
OTX OpenTX Taranis Programmierung - Tips und Tricks
- Themenstarter kofferfisch
- Beginndatum
Hallo, hab eine Frage zu den Softwareständen Opentx-taranis und Opentx-taranis-plus. Habe hier im Forum und auch bei RC-Groups gesucht. Finde aber keinen Hinweis auf den Unterschied der beiden Versionen. Also wer kann mir sagen was die PLusversion (evtl mehr) kann.Wo liegen die Unterschiede.
Gisbert
Gisbert
Hy,
aktuell ist noch die Hardware der Taranis
Dann kommt die Taranis Plus mit ein paar Änderungen in der Hardware, Stufenschalter, Haptik, intern ein paar Änderungen
Das kann alles für kleines Geld in die bestehende Taranis nachgerüstet werden.
Die aktuelle opentx ist noch die r2940 bzw r2943 und companionv1.52
Dann wird gerade die Software opentxV2.0 entwickelt
Dazu gibt es die Vorabtestversionen V1.99 für opentx und Companion
die in verschiedenen Versionen hier mal reingestellt werden.
Was kann opentxV2.0 mehr als die bisherige, wo soll ich da anfangen:
ich kopier mal hier rein.
Major release, a lot of new features ...
Proportional fonts
Switch warnings can be disabled for switches you don't use on a given model
Compensation for offset error of FrSky FAS-xx current sensors (option on m64)
Measured consumption (mAh) can be stored on power off (ARM-based boards only)
0.1% resolution for limits (ARM boards only)
Sound repeat time settable in multiples of 1sec, call at model load can be disabled (ARM boards only)
3 options for timer countdown voice output (ARM boards only)
Inputs layer with support for all physical inputs and telemetry (Taranis only)
Lua interpreter for runtime scripts and one-time configuration assistants (Taranis only)
9 GVARS instead of 5 (ARM boards only)
GVARs useable for offsets and limits (Taranis only)
GVAR modification popup on home screen can be enabled/disabled for each GVAR (Taranis only)
Output curve assignable to each servo on the SERVOS page (Taranis only)
32 curves instead of 16, with smoothing, and any number of points between 2 and 17 (Taranis only)
64 custom functions instead of 32 (ARM boards only)
New trim system (a mode's trims can be relative to that of another mode's)
Pot position memory for the 4 pots, with startup warning (Taranis only)
Ability to read text files from the SD card. A file with the name of a model will be linked to it and easily accessible as "model notes".
Can be displayed automatically at model load for use as a checklist. (Taranis only)
Copy/paste/insert/delete of custom function lines (Taranis only)
Altitude can be displayed in the top bar (Taranis only)
FrSky Taranis will run at 120MHz instead of 60MHz
Bootloader for Taranis, removes the need to install computer drivers to flash new firmware
SPORT data form internal module available on the UART connector in the battery compartment in the Taranis
Companion merged into OpenTX
Companion major code / graphics refactoring
Radio can handle EEPROM conversion by itself (no need for companion, ARM boards only)
Support for the 6-position pots on Taranis, with individual positions available in the switch selection list
Sticky Logical Switches
ASpd, dTE, Cel-, Vfas- added to Telemetry values
Inproved vario sounds (ARM boards only)
Taranis will be useable as a standard PC joystick through USB, 8 analogs and 8 buttons mapped to CH1-8 and 9-16 respectively
Workaround for newer bogus FlySky modules that send out servo centers on powerup (9x only)
Finnish language support
Default audio files can be placed on the SD card for each model for all switch positions (both for physical and logical switches).
Support for up to 16 channels on trainer input
Einfach nochmal viel mehr
da wir schon lange mit V1.99 arbeiten fällt das uns gar nicht mehr auf
Im aktuellen deutschen Handbuch ist davon das meiste schon drinnen.
im Anhang als pdf gezipt
Helle
aktuell ist noch die Hardware der Taranis
Dann kommt die Taranis Plus mit ein paar Änderungen in der Hardware, Stufenschalter, Haptik, intern ein paar Änderungen
Das kann alles für kleines Geld in die bestehende Taranis nachgerüstet werden.
Die aktuelle opentx ist noch die r2940 bzw r2943 und companionv1.52
Dann wird gerade die Software opentxV2.0 entwickelt
Dazu gibt es die Vorabtestversionen V1.99 für opentx und Companion
die in verschiedenen Versionen hier mal reingestellt werden.
Was kann opentxV2.0 mehr als die bisherige, wo soll ich da anfangen:
ich kopier mal hier rein.
Major release, a lot of new features ...
Proportional fonts
Switch warnings can be disabled for switches you don't use on a given model
Compensation for offset error of FrSky FAS-xx current sensors (option on m64)
Measured consumption (mAh) can be stored on power off (ARM-based boards only)
0.1% resolution for limits (ARM boards only)
Sound repeat time settable in multiples of 1sec, call at model load can be disabled (ARM boards only)
3 options for timer countdown voice output (ARM boards only)
Inputs layer with support for all physical inputs and telemetry (Taranis only)
Lua interpreter for runtime scripts and one-time configuration assistants (Taranis only)
9 GVARS instead of 5 (ARM boards only)
GVARs useable for offsets and limits (Taranis only)
GVAR modification popup on home screen can be enabled/disabled for each GVAR (Taranis only)
Output curve assignable to each servo on the SERVOS page (Taranis only)
32 curves instead of 16, with smoothing, and any number of points between 2 and 17 (Taranis only)
64 custom functions instead of 32 (ARM boards only)
New trim system (a mode's trims can be relative to that of another mode's)
Pot position memory for the 4 pots, with startup warning (Taranis only)
Ability to read text files from the SD card. A file with the name of a model will be linked to it and easily accessible as "model notes".
Can be displayed automatically at model load for use as a checklist. (Taranis only)
Copy/paste/insert/delete of custom function lines (Taranis only)
Altitude can be displayed in the top bar (Taranis only)
FrSky Taranis will run at 120MHz instead of 60MHz
Bootloader for Taranis, removes the need to install computer drivers to flash new firmware
SPORT data form internal module available on the UART connector in the battery compartment in the Taranis
Companion merged into OpenTX
Companion major code / graphics refactoring
Radio can handle EEPROM conversion by itself (no need for companion, ARM boards only)
Support for the 6-position pots on Taranis, with individual positions available in the switch selection list
Sticky Logical Switches
ASpd, dTE, Cel-, Vfas- added to Telemetry values
Inproved vario sounds (ARM boards only)
Taranis will be useable as a standard PC joystick through USB, 8 analogs and 8 buttons mapped to CH1-8 and 9-16 respectively
Workaround for newer bogus FlySky modules that send out servo centers on powerup (9x only)
Finnish language support
Default audio files can be placed on the SD card for each model for all switch positions (both for physical and logical switches).
Support for up to 16 channels on trainer input
Einfach nochmal viel mehr
da wir schon lange mit V1.99 arbeiten fällt das uns gar nicht mehr auf
Im aktuellen deutschen Handbuch ist davon das meiste schon drinnen.
im Anhang als pdf gezipt
Helle
Anhänge
-
5,9 MB Aufrufe: 271
Zuletzt bearbeitet:
Hallo, hab eine Frage zu den Softwareständen Opentx-taranis und Opentx-taranis-plus. Habe hier im Forum und auch bei RC-Groups gesucht. Finde aber keinen Hinweis auf den Unterschied der beiden Versionen. Also wer kann mir sagen was die PLusversion (evtl mehr) kann.Wo liegen die Unterschiede.
Gisbert
Gisbert
Hallo Ich bins mal wieder und hab da gleich mal ne frage.
Ich würde gerne die taranis für ein 2. Schiff verwenden. Allerdings sollten beide schiffe auf dem Wasser sein.
Ist es möglich die Empfänger so zu binden, das ich beim wechsel der Modelle auch die epmfpänger wechsel?
Wenn ich also mit dem einen Schiff rausfahre und dann bei der taranis das modell wechsel mit einem anderen Schiff weiterfahre ohne das 1. auszumachen?
Ich würde gerne die taranis für ein 2. Schiff verwenden. Allerdings sollten beide schiffe auf dem Wasser sein.
Ist es möglich die Empfänger so zu binden, das ich beim wechsel der Modelle auch die epmfpänger wechsel?
Wenn ich also mit dem einen Schiff rausfahre und dann bei der taranis das modell wechsel mit einem anderen Schiff weiterfahre ohne das 1. auszumachen?
Hy
ja klar, für jedes Modell getrennt einstellbar, heist sich Modellmatch
Beim Binden musst du eine Empfängernummer vergeben, die ist frei einstellbar.
Normal wird Modell 1 die Nummer 1 erhalten, Modell 2 Nummer 2 usw.
Wenn du dann auf ein anderes Modell umschaltest wird nur dieses Modell reagieren, das andere macht dann gar nichts.
Helle
ja klar, für jedes Modell getrennt einstellbar, heist sich Modellmatch
Beim Binden musst du eine Empfängernummer vergeben, die ist frei einstellbar.
Normal wird Modell 1 die Nummer 1 erhalten, Modell 2 Nummer 2 usw.
Wenn du dann auf ein anderes Modell umschaltest wird nur dieses Modell reagieren, das andere macht dann gar nichts.
Helle
Anhänge
-
 2,4 KB Aufrufe: 29
2,4 KB Aufrufe: 29
Du musst halt Falsafe so einstellen dass das Schiff das macht was es soll.
Wenn Dir 8 Kanäle pro Schiff reichen gibt es eine noch bessere Lösung, Du bindest beide Empfänger auf einen Modell-Kanal (Selbe Empfänger Nummer aber nur 1x Telemtrie ein) und machst die Steuerung per Schalter umschaltbar.
So kannst Du per Schalter Auswählen welches der beiden Schiffe gerade gesteuert wird.
Wenn Du mehr als 8 Kanäle pro Schiff brauchst dann würde das über eine zusätzliches Sendemodul gehen, dann hättest 16 Kanäle pro Schiff. Allerdings dürften die Schalter dann nicht mehr ausreichen.
Möglich wäre Beispielsweise auch dass 1 Schiff mit den Sticks gesteuert wird und das andere mit den Slider (Drehpotis).
Oder beide Knüppel "Nick" auf Rastened ohen Rückstellung und das 1. Schiff Motor und Ruder mit dem linken Stick und das 2. Schiff Motor und Ruder mit dem rechten Stick. So könntest beide kontrolliert bewegen.
Sepp
Wenn Dir 8 Kanäle pro Schiff reichen gibt es eine noch bessere Lösung, Du bindest beide Empfänger auf einen Modell-Kanal (Selbe Empfänger Nummer aber nur 1x Telemtrie ein) und machst die Steuerung per Schalter umschaltbar.
So kannst Du per Schalter Auswählen welches der beiden Schiffe gerade gesteuert wird.
Wenn Du mehr als 8 Kanäle pro Schiff brauchst dann würde das über eine zusätzliches Sendemodul gehen, dann hättest 16 Kanäle pro Schiff. Allerdings dürften die Schalter dann nicht mehr ausreichen.
Möglich wäre Beispielsweise auch dass 1 Schiff mit den Sticks gesteuert wird und das andere mit den Slider (Drehpotis).
Oder beide Knüppel "Nick" auf Rastened ohen Rückstellung und das 1. Schiff Motor und Ruder mit dem linken Stick und das 2. Schiff Motor und Ruder mit dem rechten Stick. So könntest beide kontrolliert bewegen.
Sepp
Hy satsepp,
ja, das haste auch recht,
dann braucht er die Modelle nicht mal umschalten,
sondern kann beide Modell praktisch gleichzeitig steuern.
Kanal 1-8 Modell 1, Empfänger 1, gebunden auf ID 1, Kanal 1-8 an den Servopins
Kanal 9-16 Modell 2, Empfänger 2, gebunden auf ID 1, Kanal 9-16 an den Serviopins
Umschalten über einen einzigen Schalter am Sender
Modell 1 die Kanäle 1-8 freigeben
Modell 2 die Kanäle 9-16 freigeben
das ist noch genialer
Helle
ja, das haste auch recht,
dann braucht er die Modelle nicht mal umschalten,
sondern kann beide Modell praktisch gleichzeitig steuern.
Kanal 1-8 Modell 1, Empfänger 1, gebunden auf ID 1, Kanal 1-8 an den Servopins
Kanal 9-16 Modell 2, Empfänger 2, gebunden auf ID 1, Kanal 9-16 an den Serviopins
Umschalten über einen einzigen Schalter am Sender
Modell 1 die Kanäle 1-8 freigeben
Modell 2 die Kanäle 9-16 freigeben
das ist noch genialer
Helle
Zuletzt bearbeitet:
Helle könntest du du mal anregen, die Modellumstellfunktion auch über Schalter machen zu können, das müsste eigentlich Sinngemäß gut in den CF passen, ein Befehl "Spring zu Modellspeicher ..." wäre gerade in diesem Fall oder eben ansonsten auch in anderen Funktionsmodellen gut zu benutzen.
So kann man in jedem Modell einen eigenen Schalter für verwenden, und entsprechende Partnermodelle anlegen, oder eben keine Verknüpfung, und alle Schalter an einem Modell
Deswegen wäre so eine Option im Obermenü nicht so geeignet, da dann der Schalter für alle verloren wäre
So kann man in jedem Modell einen eigenen Schalter für verwenden, und entsprechende Partnermodelle anlegen, oder eben keine Verknüpfung, und alle Schalter an einem Modell
Deswegen wäre so eine Option im Obermenü nicht so geeignet, da dann der Schalter für alle verloren wäre
Hi,
ich habe Dan mal eine kleine Herausforderung für die Programmierung:
Ein Pan/Tilt Mechanismus ist recht dicht auf einem Rumpf.
Wenn ich Geradeausschaue, darf die Kamera nicht nach unten schwenken, weil sie sonst auf dem Rumpf aufschlägt. Links und rechts geschwenkt könnte ich aber gut runter sehen.
Wie benutze ich die Pan Werte als Endwerte für Tilt ? Kurve ? Variable für Servoendwert?
ich habe Dan mal eine kleine Herausforderung für die Programmierung:
Ein Pan/Tilt Mechanismus ist recht dicht auf einem Rumpf.
Wenn ich Geradeausschaue, darf die Kamera nicht nach unten schwenken, weil sie sonst auf dem Rumpf aufschlägt. Links und rechts geschwenkt könnte ich aber gut runter sehen.
Wie benutze ich die Pan Werte als Endwerte für Tilt ? Kurve ? Variable für Servoendwert?
")
Hy,
doch das geht schon:
pan / tilt Kuven- Abhängigkeiten
Pan = Horizontalachse
Tilt = Vertikalachse
Das ist eine Geschütz-Horizonallininen-Ausblendung --> so heißt das bei der Artillerie -->..."nicht auf den Kirchturm schießen"
Pan als X-Achse -100 bis +100 gibt auf servo1 +/-60° bis +/-90°
Tilt als y-Achse in Abhängigkeit der X-Achse-Kurve, auf Servo2
diese Horizontal Grenzkurve die nicht unter/überschritten werden darf.
Ausgang Kanal Pan --> Eingang Kanal Tilt -->Horizontal-Grenz-Kurve-->
dieser Wert via GVARS dann wie ein Gaslimiter der nicht unter/überschritten wird.
-----------------------------
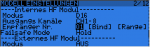
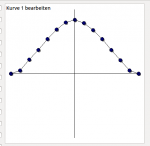
Ich hab mal zum Testen folgendes eingestellt.
Quer als Horizonalbewegung
Höhe als Vertialbewegung
Kanal 10 ist die normale Horizontal Bewegung
Kanal 11 ist ein Hilfskanal der in Abhängigkeit von Kanal10 eine Kurve abfährt, (das ist die Grenzbewegung für den Limiter)
Diese Grenzwerte des Kanal 11 gehen auf eine GVAR in den Spezialfunktionen
Kanal12 ist der eigentliche Limiter für die vertikale Bewegung, das Replace begrenzt die max Bewegung.
Hinweis:
Die Kurve darf nur im positive Bereich eingestellt werden (da noch keine Funktion |a|>b)
Helle
doch das geht schon:
pan / tilt Kuven- Abhängigkeiten
Pan = Horizontalachse
Tilt = Vertikalachse
Das ist eine Geschütz-Horizonallininen-Ausblendung --> so heißt das bei der Artillerie -->..."nicht auf den Kirchturm schießen"
Pan als X-Achse -100 bis +100 gibt auf servo1 +/-60° bis +/-90°
Tilt als y-Achse in Abhängigkeit der X-Achse-Kurve, auf Servo2
diese Horizontal Grenzkurve die nicht unter/überschritten werden darf.
Ausgang Kanal Pan --> Eingang Kanal Tilt -->Horizontal-Grenz-Kurve-->
dieser Wert via GVARS dann wie ein Gaslimiter der nicht unter/überschritten wird.
-----------------------------
Ich hab mal zum Testen folgendes eingestellt.
Quer als Horizonalbewegung
Höhe als Vertialbewegung
Kanal 10 ist die normale Horizontal Bewegung
Kanal 11 ist ein Hilfskanal der in Abhängigkeit von Kanal10 eine Kurve abfährt, (das ist die Grenzbewegung für den Limiter)
Diese Grenzwerte des Kanal 11 gehen auf eine GVAR in den Spezialfunktionen
Kanal12 ist der eigentliche Limiter für die vertikale Bewegung, das Replace begrenzt die max Bewegung.
Hinweis:
Die Kurve darf nur im positive Bereich eingestellt werden (da noch keine Funktion |a|>b)
Helle
Anhänge
-
 14,8 KB Aufrufe: 23
14,8 KB Aufrufe: 23 -
 7,5 KB Aufrufe: 22
7,5 KB Aufrufe: 22 -
 7,2 KB Aufrufe: 20
7,2 KB Aufrufe: 20 -
 23,1 KB Aufrufe: 20
23,1 KB Aufrufe: 20
Zuletzt bearbeitet:



