
Baubericht SIX Medium Hexa von quadframe
- Themenstarter schneipe
- Beginndatum

So, heute neuen Batterieträger gemacht, das vorläufige mechanische Gimbal drunter, hier was weg, da was weg.....
Copter wiegt jetzt genau..
- Copter mit Gimbal ohne Lipo 2490 Gramm
- Copter mit Gimbal und 4s 5000mA/h 2900Gramm
- Copter mit Gimbal, Lipo und Nex5 3350Granmm
Denke das Gimbal durch ein BLGimbal ersetzen, dann komm ich auf 3500Gramm Endgewicht.
Copter wiegt jetzt genau..
- Copter mit Gimbal ohne Lipo 2490 Gramm
- Copter mit Gimbal und 4s 5000mA/h 2900Gramm
- Copter mit Gimbal, Lipo und Nex5 3350Granmm
Denke das Gimbal durch ein BLGimbal ersetzen, dann komm ich auf 3500Gramm Endgewicht.
@schneipe, wie hast du denn das mit dem Gewicht hinbekommen? Dein Artikel hat mich auf die Idee gebracht, mein Bauwerk auch mal auf die Waage zu stellen. Also ich komme auch auf ca. 3400g - aber ohne  Gimbal, Kamera, HDMI-Wandler, FPV-TX... Aber dafür habe ich auch zwei Lipos drauf. Bin ja mal gespannt, wie sich das Teil fliegt...komme hier nicht so recht vorwärts - muss noch das BL-Gimbal komplett zusammenbauen und mit dem Landegestell verbinden, und, und...
Gimbal, Kamera, HDMI-Wandler, FPV-TX... Aber dafür habe ich auch zwei Lipos drauf. Bin ja mal gespannt, wie sich das Teil fliegt...komme hier nicht so recht vorwärts - muss noch das BL-Gimbal komplett zusammenbauen und mit dem Landegestell verbinden, und, und...
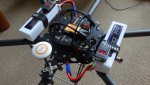
Was ich an der jetzigen Bauweise echt super finde, ist die komplette Trennung der eigentlichen "Flugmaschine" vom "FPV-/Video-/Fotozubehör", welches alles ans Ladegestell kommt. Einzige Verbindung zum Landestell soll dann ein XT60 für die Spannungsversorgung und 2-3 Kabel zum Empfänger (Gimbalsteuerung und IR-Auslösung der Kamera) sein.
So schaut er derzeit aus - noch ungeflogen:

Grüße
Mirko
Gimbal, Kamera, HDMI-Wandler, FPV-TX... Aber dafür habe ich auch zwei Lipos drauf. Bin ja mal gespannt, wie sich das Teil fliegt...komme hier nicht so recht vorwärts - muss noch das BL-Gimbal komplett zusammenbauen und mit dem Landegestell verbinden, und, und...Was ich an der jetzigen Bauweise echt super finde, ist die komplette Trennung der eigentlichen "Flugmaschine" vom "FPV-/Video-/Fotozubehör", welches alles ans Ladegestell kommt. Einzige Verbindung zum Landestell soll dann ein XT60 für die Spannungsversorgung und 2-3 Kabel zum Empfänger (Gimbalsteuerung und IR-Auslösung der Kamera) sein.
So schaut er derzeit aus - noch ungeflogen:
Grüße
Mirko
Ich hab auf alles überflüssige Gewicht verzichtet. Ich hab die 16mm Rohre. Bei mir ist es so, alles hängt am Landegestell, nur der Rahmen ist mit 4 Gummidämpfer mit dem Landegestell verbunden.
Die Lipoüberwchung an Bord schneke ich mir, da ich Telemetrie( Iisi Cockpit) habe, und mir alle relevanten Daten auf dem Display angezeigt werden. Ich fliege nicht nach Zeit, sondern nach verbrauchten mA/H. Bei 2500mA/h bekomm ich kurz Alarm, und bei 4200mA/h Daueralarm der mich zum Landen zwingt.
Die Lipoüberwchung an Bord schneke ich mir, da ich Telemetrie( Iisi Cockpit) habe, und mir alle relevanten Daten auf dem Display angezeigt werden. Ich fliege nicht nach Zeit, sondern nach verbrauchten mA/H. Bei 2500mA/h bekomm ich kurz Alarm, und bei 4200mA/h Daueralarm der mich zum Landen zwingt.


Bin heute das erste Mal mit dem neuen Hexa geflogen . Ich muss sagen, der absolute Wahnsinn - liegt super in der Luft und selbst aus 100m Höhe kommt er ohne zu zucken und zu schaukeln einfach runter. Bin begeistert und die neue Naza V2 scheint echt super zu laufen. Die Motoren/Prop-Kombi erweist sich als durchzugsstark mit coolem Sound. Einzig mit dem anlaufen der Motoren (Steuerung auf intelligent und Motor-Idle-Speed auf High) hab ich noch ein Problem ab dem zweiten Start. Hierbei laufen nur 1 bis 2 Motoren an und bei Gas über 50% startet der ganz normal. Also das Teil funktioniert super aber so ein richtig gutes Gefühl habe ich hierbei noch nicht. Dann bin ich mir mit den Reglern noch nicht so sicher - ich denke mal die liegen nach 15 Minuten durch die Gegend düsen, bei ca. 50 Grad, hatte gehofft die bleiben ein wenig kälter.
Nach diesen positiven Erstflug geht's dann weiter mit dem Kamerakram. Meine NEX-5R kommt nun endlich morgen, damit habe ich dann alles zusammen. Brauch vielleicht noch ein paar Spannungsfilter für die 5V (HDMI-to-AV) und 10V (Fatshark-Sender). Außerdem müssen noch ein paar LEDs dran, hab ich eben gemerkt.
Grüße
Mirko
. Ich muss sagen, der absolute Wahnsinn - liegt super in der Luft und selbst aus 100m Höhe kommt er ohne zu zucken und zu schaukeln einfach runter. Bin begeistert und die neue Naza V2 scheint echt super zu laufen. Die Motoren/Prop-Kombi erweist sich als durchzugsstark mit coolem Sound. Einzig mit dem anlaufen der Motoren (Steuerung auf intelligent und Motor-Idle-Speed auf High) hab ich noch ein Problem ab dem zweiten Start. Hierbei laufen nur 1 bis 2 Motoren an und bei Gas über 50% startet der ganz normal. Also das Teil funktioniert super aber so ein richtig gutes Gefühl habe ich hierbei noch nicht. Dann bin ich mir mit den Reglern noch nicht so sicher - ich denke mal die liegen nach 15 Minuten durch die Gegend düsen, bei ca. 50 Grad, hatte gehofft die bleiben ein wenig kälter.Nach diesen positiven Erstflug geht's dann weiter mit dem Kamerakram. Meine NEX-5R kommt nun endlich morgen, damit habe ich dann alles zusammen. Brauch vielleicht noch ein paar Spannungsfilter für die 5V (HDMI-to-AV) und 10V (Fatshark-Sender). Außerdem müssen noch ein paar LEDs dran, hab ich eben gemerkt.
Grüße
Mirko
Zuletzt bearbeitet:
Wieso 10V für den FatShark? Der verträgt doch die 12V. Und er gibt sogar 5V aus, die habe ich für den Konverter genommen. Somit reicht ein 3poliges Servokabel vom Konverter zum FatShark (+5V, Masse, Videosignal).
Die 12V greife ich am 4s Balancer ab. Nehme hierzu die Masse und den 4. Draht. Nach dem Flug sind die Zellen trotzdem gleich leer.
Spannungsfilter hatte ich am Anfang auch drin, doch es geht auch so ohne Probleme.
Welche Motoren und Regler hast du nochmal? Meine 25A SimonK wurden auch Knallheiß, jetzt die neuen UBEC N-FET 30A werden gerade mal Handwarm, und das bei 36° Aussentemperatur. Die älteren 25A von Flyduino sind nicht Teillastfest.
Wenn du dir den Konverter noch kaufen musst, hol dir den von Amazon. Den von GoodLuckBuy kannst vergessen. Geht an der Nex5R nicht. Hab den von Amazon ausgepackt aus dem Gehäuse, Kabel direkt rangelötet und eingeschrumpft.
Die 12V greife ich am 4s Balancer ab. Nehme hierzu die Masse und den 4. Draht. Nach dem Flug sind die Zellen trotzdem gleich leer.
Spannungsfilter hatte ich am Anfang auch drin, doch es geht auch so ohne Probleme.
Welche Motoren und Regler hast du nochmal? Meine 25A SimonK wurden auch Knallheiß, jetzt die neuen UBEC N-FET 30A werden gerade mal Handwarm, und das bei 36° Aussentemperatur. Die älteren 25A von Flyduino sind nicht Teillastfest.
Wenn du dir den Konverter noch kaufen musst, hol dir den von Amazon. Den von GoodLuckBuy kannst vergessen. Geht an der Nex5R nicht. Hab den von Amazon ausgepackt aus dem Gehäuse, Kabel direkt rangelötet und eingeschrumpft.
@schneipe: Also Motoren/Props sind die MN3508-16/700Kv mit 13x4 Carbon-Props von RCTimer und als Regler hab ich die Stein-Regler Copter-Pro SK30 (mit LiPo 4S). Hatte dort extra gefragt, ob dies eine gute Kombination ist und die Regler mit den Motoren problemlos laufen. Bin mir jetzt deswegen echt ein wenig unsicher, finde aber derzeit keine besseren Regler und habe natürlich überhaupt keine Lust den Hexa wieder auseinander zu fummeln. Es ist halt echt ein riesiger Nachteil alles fest einzubauen und festzulöten, aber dies hast du ja auch schon festgestellt. Hab auch keine Ahnung, wie lange die Regler solche Temperaturen aushalten.
Für mein Spannungsproblem hab ich mir jetzt mal hier http://www.cti-modellbau.de/CTI-X-BEC/ ein paar Regler mit 5V und 10V bestellt. Man kann dort die benötigte Spannung angeben und gelöst ist das Problem.
Jetzt muss ich noch das KAMKOP-Gimbal zusammenbauen und den Alex Mos in Betrieb nehmen, wird bestimmt auch wieder spannend...
Grüße
Mirko
. Hab auch keine Ahnung, wie lange die Regler solche Temperaturen aushalten.Für mein Spannungsproblem hab ich mir jetzt mal hier http://www.cti-modellbau.de/CTI-X-BEC/ ein paar Regler mit 5V und 10V bestellt. Man kann dort die benötigte Spannung angeben und gelöst ist das Problem.
Jetzt muss ich noch das KAMKOP-Gimbal zusammenbauen und den Alex Mos in Betrieb nehmen, wird bestimmt auch wieder spannend...
Grüße
Mirko
So, meinen Hexa habe ich – nach diversen Hindernissen - auch endlich flugfertig. Beleuchtung fehlt aber noch komplett. Für meine GoPro habe ich mir bei eyefly noch ein leichtes Gehäuse bestellt. Ohne ist mir doch zu unsicher und das Standardgehäuse ist mir zu schwer.
Was war passiert: beim Zusammenbau hatte ich nicht aufgepasst, dass eine meiner diversen Dokus für das Crius-Board die Motorenanschlüsse für Megapirates abgebildet hatte. War ja für meinen Quattro egal, da sind die Anschlüsse mit der Multiwii identisch. So hatte ich jeweils die beiden seitlichen Motoren falsch angeschlossen. Eine solche Flugschau möchte ich nicht noch mal erleben. Gleich nach dem ersten vorsichtigen Abheben ist der Kopter seitlich an mir vorbeigeprescht. Klar – die Regelung hatte ja versucht, eine scheinbare Falschlage auszugleichen, wobei dadurch die Falschlage noch verstärkt wurde. Glück gehabt. Mir ist nichts passiert und der Kopter ist weich gelandet – alles heile. Puuuuhh.
Bin dann akribisch die Belegung durchgegangen und habe meinen Fehler gefunden. Hinterher ist man immer schlauer…
Nächster Test – diesmal im Garten mit viiieeel Abstand. Toll. Kopter hebt ab. Steht schön auf der Stelle. Fliege leichtes Hin und Her – noch relativ dicht über dem Boden. Und nach ca. 2 min Flugzeit stürzt er mit einem mal ab. Aber immer noch alles heile. Also Motoren einfach mal neu gestartet. Jetzt blockiert der M1 – nur Zucken. Erst mit mehr Gas läuft der Motor an. Also Motorkabel am ESC nachgelötet. Beim Testlauf war jetzt alles ok.
3. Testflug. Gleiches Ergebnis wie zuvor(2 min alles ok dann Absturz)- nur diesmal M4. Muss wohl auch nachgelötet werden!? Am nächsten Morgen nur noch mal kurz an Lipo angeschlossen um Startverhalten zu betrachten. Na ja, nach ca. 2 Sekunden Strom verabschiedet sich der ESC mit Feuer und Flamme. Und ganz viel Qualm. Das stinkt vielleicht…
Einen Reserve ESC (30A Varinate mit Simonk von RCTimer) hatte ich noch. Also austauschen. Da ich aus Gewichtsgründen die ESCs direkt verlöte, könnt ihr euch den Aufwand ja vorstellen .
Neuer Testlauf. M4 jetzt wieder ok, dafür muckt jetzt wieder M1. Und nachlöten hat diesmal auch nicht geholfen.
Anscheinend – in weiser Voraussicht – hatte ich bei einer anderen Bestellung bereits zusätzliche ESCs bestellt. Die waren allerdings mit einem Silabs-Chip und ohne spezielle Kopterfirmware. Also erst mal mit Hilfe von Olliw.eu einen owSilProg-Programmer aufgebaut und die ESCs geflashed. Das schreibt sich ja schön schnell – hat aber schon gedauert, bis ich alles verstanden hatte.
Dann wieder: Kopter auseinander, alle alten ESCs ab, die neuen rein, anlöten, zusammenbauen. Dann war erst einmal ein Motortest angesagt. Jeden Motor einzeln erst mal ein paar Minuten laufen lassen. Aber diesmal war endlich alles ok.
In der Zwischenzeit hatte ich meine Lipos über einen Y-Stecker (http://cgi.ebay.de/ws/eBayISAPI.dll?ViewItem&item=221180463478) fest verlötet. Hatte mir nur keine Gedanken gemacht, dass ich die dann ja auch parallel laden muss – und das hatte ich bisher noch nie gemacht. So konnte ich zunächst nur einen kurzen (5 Min) Erstflug mit dem restlichen Akkuinhalt durchführen – und den auch nur sehr vorsichtig. Aber jetzt scheint alles ok zu sein. Lipo parallel laden kann ich mittlerweile auch. Jetzt sollte dann nur noch etwas weniger Wind sein für die nächsten Versuche (dann mit GoPro).
Meine Daten:
Kopergewicht ohne Lipo und ohne GoPro: 2020g
Koptergewicht mit allem (derzeit): 3310g
Motoren: T-Motor MN3508-16 700KV
ESCs: Turnigy Plush 30A, geflashed mit Blheli
FC: CRIUS AIOP v1 mit Multiwii 2.1 (mit opt. Barocode)
GPS: u-Blox CN-06
Lipo: 2 x XTRON a 5300 mAh
Prop: CFK 13x4
Stromverbrauch beim Schweben: ca. 27A
LG Holger
Was war passiert: beim Zusammenbau hatte ich nicht aufgepasst, dass eine meiner diversen Dokus für das Crius-Board die Motorenanschlüsse für Megapirates abgebildet hatte. War ja für meinen Quattro egal, da sind die Anschlüsse mit der Multiwii identisch. So hatte ich jeweils die beiden seitlichen Motoren falsch angeschlossen. Eine solche Flugschau möchte ich nicht noch mal erleben. Gleich nach dem ersten vorsichtigen Abheben ist der Kopter seitlich an mir vorbeigeprescht. Klar – die Regelung hatte ja versucht, eine scheinbare Falschlage auszugleichen, wobei dadurch die Falschlage noch verstärkt wurde. Glück gehabt. Mir ist nichts passiert und der Kopter ist weich gelandet – alles heile. Puuuuhh.
Bin dann akribisch die Belegung durchgegangen und habe meinen Fehler gefunden. Hinterher ist man immer schlauer…
Nächster Test – diesmal im Garten mit viiieeel Abstand. Toll. Kopter hebt ab. Steht schön auf der Stelle. Fliege leichtes Hin und Her – noch relativ dicht über dem Boden. Und nach ca. 2 min Flugzeit stürzt er mit einem mal ab. Aber immer noch alles heile. Also Motoren einfach mal neu gestartet. Jetzt blockiert der M1 – nur Zucken. Erst mit mehr Gas läuft der Motor an. Also Motorkabel am ESC nachgelötet. Beim Testlauf war jetzt alles ok.
3. Testflug. Gleiches Ergebnis wie zuvor(2 min alles ok dann Absturz)- nur diesmal M4. Muss wohl auch nachgelötet werden!? Am nächsten Morgen nur noch mal kurz an Lipo angeschlossen um Startverhalten zu betrachten. Na ja, nach ca. 2 Sekunden Strom verabschiedet sich der ESC mit Feuer und Flamme. Und ganz viel Qualm. Das stinkt vielleicht…
Einen Reserve ESC (30A Varinate mit Simonk von RCTimer) hatte ich noch. Also austauschen. Da ich aus Gewichtsgründen die ESCs direkt verlöte, könnt ihr euch den Aufwand ja vorstellen
. Neuer Testlauf. M4 jetzt wieder ok, dafür muckt jetzt wieder M1. Und nachlöten hat diesmal auch nicht geholfen.
Anscheinend – in weiser Voraussicht – hatte ich bei einer anderen Bestellung bereits zusätzliche ESCs bestellt. Die waren allerdings mit einem Silabs-Chip und ohne spezielle Kopterfirmware. Also erst mal mit Hilfe von Olliw.eu einen owSilProg-Programmer aufgebaut und die ESCs geflashed. Das schreibt sich ja schön schnell – hat aber schon gedauert, bis ich alles verstanden hatte.
Dann wieder: Kopter auseinander, alle alten ESCs ab, die neuen rein, anlöten, zusammenbauen. Dann war erst einmal ein Motortest angesagt. Jeden Motor einzeln erst mal ein paar Minuten laufen lassen. Aber diesmal war endlich alles ok.
In der Zwischenzeit hatte ich meine Lipos über einen Y-Stecker (http://cgi.ebay.de/ws/eBayISAPI.dll?ViewItem&item=221180463478) fest verlötet. Hatte mir nur keine Gedanken gemacht, dass ich die dann ja auch parallel laden muss – und das hatte ich bisher noch nie gemacht. So konnte ich zunächst nur einen kurzen (5 Min) Erstflug mit dem restlichen Akkuinhalt durchführen – und den auch nur sehr vorsichtig. Aber jetzt scheint alles ok zu sein. Lipo parallel laden kann ich mittlerweile auch. Jetzt sollte dann nur noch etwas weniger Wind sein für die nächsten Versuche (dann mit GoPro).
Meine Daten:
Kopergewicht ohne Lipo und ohne GoPro: 2020g
Koptergewicht mit allem (derzeit): 3310g
Motoren: T-Motor MN3508-16 700KV
ESCs: Turnigy Plush 30A, geflashed mit Blheli
FC: CRIUS AIOP v1 mit Multiwii 2.1 (mit opt. Barocode)
GPS: u-Blox CN-06
Lipo: 2 x XTRON a 5300 mAh
Prop: CFK 13x4
Stromverbrauch beim Schweben: ca. 27A
LG Holger
Anhänge
-
 1,1 MB Aufrufe: 65
1,1 MB Aufrufe: 65
Kurzfristig hast du damit natürlich recht. Mit so viel Pech muss man normalerweise aber nicht rechnen. Nichts für ungut, aber wenn dann alles ok ist, profitiere ich anschließend längerfristig von dem geringeren Gewicht. Immerhin haben wir anscheinend bei einer ansonsten gut vergleichbaren Konfiguration ca 470g Unterschied (Copter mit Gimbal ohne Lipo). Meine Erwartung ist, dass sich das in der Flugzeit bemerkbar machen wird.
Hallo liebe Leute,
ich habe mit Begeisterung eure Unterhaltung hier mitgelesen und viele meiner Fragen wurden darin auch beantwortet, weitere tauchten auf und seit der Motoren/Luftschrauben-Disskussion bin ich völlig verwirrt
Kurz zu mir: Ich heiße Thomas, bin Student (nur noch für wenige Wochen) und fliege zur Zeit einen DJI Phantom, überlege mir aber einen großen Hexacopter zum fotographien zu bauen... Zuerst bin ich auf die Babylibelle von DJI gestoßen, hab aber hier schon gesehen, dass man viel Geld sparen kann, wenn man selbst ein bisschen Hand anlegt und Spass machts sicher auch... Also werd ich wohl selbst einen Hexa aufbauen... Dazu würde mir als Basis der Copter Deluxe Hexacopter Naos Standard gefallen, eventuell V2, wobei ich mir über die Unterschiede noch nicht so ganz im Klaren bin...
Bei dem V2 wären SimonK 30A Regler dabei, lohnt der Preisunterschied?
Welche Funke, welchen Sender würdet ihr mir dazu empfehlen? Evtl. sollte da ein Kanal für ein Gimbal frei sein, um das manuell nicken lassen zu können...
Gibts alternativen? Welche Rahmen und Zusammenstellungen haben sich jetzt bewährt? Hier haben alle irgendwie ständig alles Mögliche getauscht, ich blick nicht mehr so ganz durch
LG
Thomas
ich habe mit Begeisterung eure Unterhaltung hier mitgelesen und viele meiner Fragen wurden darin auch beantwortet, weitere tauchten auf und seit der Motoren/Luftschrauben-Disskussion bin ich völlig verwirrt
Kurz zu mir: Ich heiße Thomas, bin Student (nur noch für wenige Wochen) und fliege zur Zeit einen DJI Phantom, überlege mir aber einen großen Hexacopter zum fotographien zu bauen... Zuerst bin ich auf die Babylibelle von DJI gestoßen, hab aber hier schon gesehen, dass man viel Geld sparen kann, wenn man selbst ein bisschen Hand anlegt und Spass machts sicher auch... Also werd ich wohl selbst einen Hexa aufbauen... Dazu würde mir als Basis der Copter Deluxe Hexacopter Naos Standard gefallen, eventuell V2, wobei ich mir über die Unterschiede noch nicht so ganz im Klaren bin...
Bei dem V2 wären SimonK 30A Regler dabei, lohnt der Preisunterschied?
Welche Funke, welchen Sender würdet ihr mir dazu empfehlen? Evtl. sollte da ein Kanal für ein Gimbal frei sein, um das manuell nicken lassen zu können...
Gibts alternativen? Welche Rahmen und Zusammenstellungen haben sich jetzt bewährt? Hier haben alle irgendwie ständig alles Mögliche getauscht, ich blick nicht mehr so ganz durch
LG
Thomas
Also als Funke brauchst eine 8 Kanal, wenn du Gimbal und Kamerauslösung steuern möchtest.
Dein Setup hängt davon ab, was genau du machen willst. Nur eine GoPro rumfliegen, oder schon was größeres? Wenn du lange Flugzeiten willst, musst du 4s oder mehr nehmen.
Regler würde ich die F-20A oder die F-30A vom Hobbyking nehmen, mit SimonK flashen und gut. Motoren würde ich bei der Tiger Motorenpalette bleiben.
Denke mal die MT2814 oder MN3508 mit 12 oder 13", vielleicht noch 14" bei 4s
Dein Setup hängt davon ab, was genau du machen willst. Nur eine GoPro rumfliegen, oder schon was größeres? Wenn du lange Flugzeiten willst, musst du 4s oder mehr nehmen.
Regler würde ich die F-20A oder die F-30A vom Hobbyking nehmen, mit SimonK flashen und gut. Motoren würde ich bei der Tiger Motorenpalette bleiben.
Denke mal die MT2814 oder MN3508 mit 12 oder 13", vielleicht noch 14" bei 4s
Bei dem V2 wäre ja folgendes Update dabei:
http://www.copterdeluxe.com/Copter-Deluxe-Hexacopter-Naos-Standard-V2
Kann man das so lassen? Ich hab zwar ne Hero3, da soll aber wenn mehr Budget vorhanden ist was größeres drunter...
8 Kanal ist klar, aber was? Graupner, Spektrum, ...? Auf was soll ich achten? Telemetrie haben die fast alle, oder? Damit ich wenigstens die Höhe mal weiß, das nervt beim Phantom ein bisschen...
Wenn ich 2 Akkus nehme, muss ich dazu nur 2 Anschlüsse auf die Platine löten, oder? Dann wären die damit automatisch parallel und würden sich gleichzeitig entladen...???
http://www.copterdeluxe.com/Copter-Deluxe-Hexacopter-Naos-Standard-V2
Kann man das so lassen? Ich hab zwar ne Hero3, da soll aber wenn mehr Budget vorhanden ist was größeres drunter...
8 Kanal ist klar, aber was? Graupner, Spektrum, ...? Auf was soll ich achten? Telemetrie haben die fast alle, oder? Damit ich wenigstens die Höhe mal weiß, das nervt beim Phantom ein bisschen...
Wenn ich 2 Akkus nehme, muss ich dazu nur 2 Anschlüsse auf die Platine löten, oder? Dann wären die damit automatisch parallel und würden sich gleichzeitig entladen...???

