
Hallo,
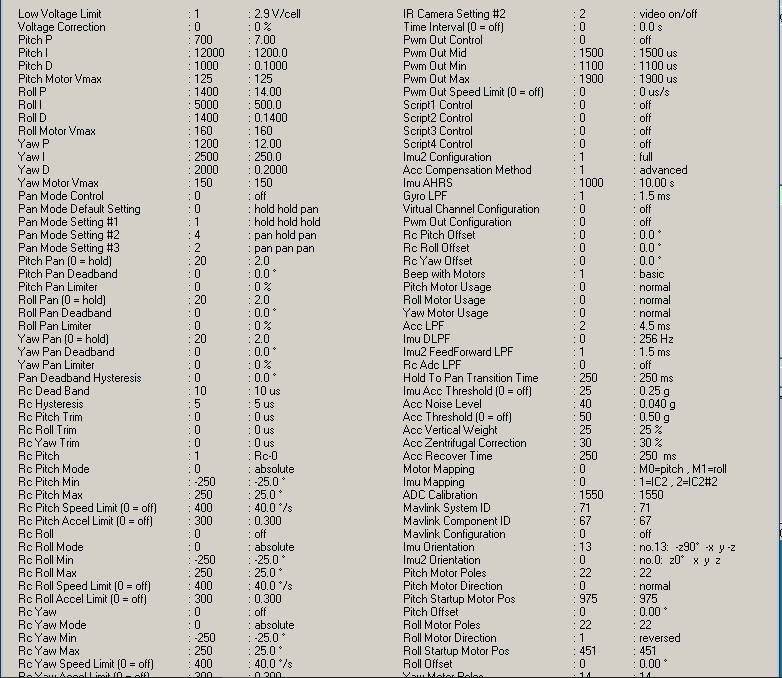
Wie geht Dein "eigenes" PID Rezept ? Habe jetzt Einstellungen gefunden die gut funktionieren, aber alles ohne 2te IMU. Wenn ich die dazu nehme gibt es Vibrationen ohne Ende. Habe auch noch das Phänomen das die Einstellungen in der Neutralstellung der Kamera perfekt sind. Wenn ich die Kamera dann mittels RC neige geht ab einem bestimmten Winkel das vibrieren los. Lediglich extrem geringe D und Power Werte auf der Pitch Achse bringen Abhilfe.
Noch eine Frage zur IMU : Macht es Sinn eine 10 DOF IMU ala GY86 o.ä. zu verbauen ? Wird irgend etwas besser ? Wird diese überhaupt unterstützt ?
LG Michael
Ich kann mich irren, aber hier ist was meine bisherige PID Erfahrung beim STorM32 mir sagt:
(Wobei ich dazu sagen muss dass ich mein eigenes PID Rezept habe, bei dem von Olli kann es anders sein)
Sobald man den 2nd IMU dazu schaltet, wird Yaw deutlich präziser, neigt dann aber dazu unter bestimmten Winkeln teils extrem zu vibrieren (und sorgt auch für Roll-Vibrationen)
Meine Meinung: Yaw mit 2nd IMU wird SEHR D-Empfindlich, ich habe D dann gefühlt um 20% reduziert und habe jetzt in garkeiner Position mehr Vibrationen drin.
Versuchts mal
(Wobei ich dazu sagen muss dass ich mein eigenes PID Rezept habe, bei dem von Olli kann es anders sein)
Sobald man den 2nd IMU dazu schaltet, wird Yaw deutlich präziser, neigt dann aber dazu unter bestimmten Winkeln teils extrem zu vibrieren (und sorgt auch für Roll-Vibrationen)
Meine Meinung: Yaw mit 2nd IMU wird SEHR D-Empfindlich, ich habe D dann gefühlt um 20% reduziert und habe jetzt in garkeiner Position mehr Vibrationen drin.
Versuchts mal
Noch eine Frage zur IMU : Macht es Sinn eine 10 DOF IMU ala GY86 o.ä. zu verbauen ? Wird irgend etwas besser ? Wird diese überhaupt unterstützt ?
LG Michael
")






