
Hallo Forum, kurz zu meiner Person:
Thorsten
BJ67
verheiratet
2x Kids (Jungs 8/9)
1x Windhund
Bin seit 20 Jahren im Fotobusiness (Sport)
Seit Ewigkeiten am RC bauen, mit Schwerpunkt Autos, bin 1/8er Nitro gefahren, 1/5er Truck und TW – wir haben glücklicherweise eine tolle RC Strecke am Hockenheimring. Fahre RC Boote (Jet Antrieb und so), dann MINI-Z seit 3-4 Jahren aktiv, wir haben eine sehr große Bahn (74 Meter Strecke) und daraus ist auch ein Online-Shop entstanden. Mittlerweile so groß das wir so um die 5000 Pakete per Jahr versenden – überwiegend Mini-Zs.
Fliegen mache ich auch, muss aber zugeben das mir da die Übung wieder fehlt und ich kein so begnadeter Flieger bin wie es beim Autofahren klappt... da bin sehr deutlich besser......
So lange Rede... ich hatte vor ZIG Jahren mal mit Y6 Koptern von Q4, Baseframe, AHM etc angefangen noch mit MK und 1H4 Steuerungen.... das war irgendwie alles experimentell wenn ich mir die NAZAs zum Beispiel jetzt anschaue.....
Wen es interessiert – ALTE Bilder vom zusammenfrickeln – aus 2010...
http://www.youtube.com/copterflight
http://www.wood-slot.com/okto/index.html
http://www.wood-slot.com/Y6-400/index.html
http://www.wood-slot.com/Y6-800/index.html
http://www.wood-slot.com/Y6600Neu/index.html
Dann habe ich jetzt wieder Interesse und mich in einiges eingelesen, das ist aber soooo viel und es ist soooo schwer das alles in kurzer Zeit zu filtern... puhhhh mir fehlen die Jahre nichts machen.... also habe ich mich hier angemeldet und hoffe das mir vielleicht doch bei der ein oder anderen zum 1000ten mal gestellten Frage geholfen wird.....")
Zuerst war der TBS Diso Pro in der sehr engen Auswahl.... dann aber wurde es der
Sky Hero Spyder 700er – zuerst mal als X4 (später als X8) mir gefallen die SKY-Heros einfach... wobei ich schon immer der Y Fan war..... da kommt noch einer
mit Xoar Props 12x5 und oder Graupnern.....
4S / 14,8V im Moment 6400mAh / 90C... 590gr.
KopterWorx KW4 Pro / 700KV
Maytech MT40A-OPTO-V1
Naza-M V2 mit GPS
Naza OSD M2
Zenmuse für GoPro
Hero3
FPV CAM extra
5,8GHZ AV TX / RX mit Monitor
Bipol Antennen
Graupner MX-20 mit GR-24 / SUM / und dem tollen Telemetrieteilchen
LED RGB Lichtleisten über 2 Kanäle....
Was ich noch einbauen will ist das Naza Data Link Zeugs, das ist ja wohl noch nicht legal in Germany. Das Waypointfliegen ist ein nettes Feature das ich für den Einsatzzweck durchaus gebrauchen kann (wiederkehrende gleiche Aufnahmen)
Einiges liegt schon auf dem Tisch und ich warte auf den Rest.
Was ich im Kopf hab ist ein leichteres Landegestell das hochklappt....
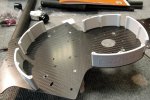
Ein Deckel aus Lexan der um einige leichter sein muss als das CFK Teil.... (ich habe da jemanden der hat mir schon einiges gemacht)
Die Batteriehalterung will ich ändern um das Gimb direkt an die untere Platte zu schrauben und um die Batterien mit einem Einschub zu versehen.... zum schnellen wechseln und für sicheren Halt.
Dank der TOLLEN Anleitungen hier habe ich die MX-20 soweit eingerichtet das auf der Naza Software alles geht..... noch 100% steige ich nicht durch..... früher hatte ich Spektrum und seither nur Pistolenfunken in der Hand
Danke Autoren!
A1 // Den ersten Ausfall? gibt es schon zu vermelden, ausgepackt und angeschlossen... so schaust es aus... oder ist das normal?!?!!? TON mal laut machen.
http://www.youtube.com/watch?v=nFAIg1-6wY0&feature=youtube_gdata
A2 // ERLEDIGT // Eine Frage ist vorhin aufgetaucht..... die V2 / LED blinkt 2x GRÜN und 3x ROT – klar kein Sat in der Werkstatt aber was bedeutet Sticks sind nicht zentriert? Ist natürlich in allen 3 Modi so....
Die Sticks sind alle auf Null und Throttle ganz unten bei -100.
Wo ist der Fehler?
A3 // Das Gimbal Zenmuse für die GOPRO... wenn es dann geht... kann man eigentlich denn Rollausgleich AUSSCHALTEN..... also über die Funke auf NULL schalten das die KAM die Bewegungen des Kopters mitmacht? Das wäre was, denn den immer geraden Horizont brauche ich nicht.
Schönen Abend
Thorsten
BAUBERICHT – Start 14.11.2013

Graupner Teile, 12 K Empfänger etc.


HD GO PRO 3 Black

XT 90 Stecker

GoPro mit Zenmuse

Naza V2 GPS
Stromverteiler
Fortsetzung - 17.11.2013 - leider fehlen noch die wichtigen Bauteile, also habe ich mal die Funke eingestellt und alles "updatet". Etwas frustrierend wie schlecht das bei Graupner gelöst ist. Anyway alles sollte jetzt theoretisch gehen....
Kann wer noch was zu A3 sagen, gibts da ein Trick?

Naza V2 GPS mit 99,3 Gramm



Stromverteilem mit Zuleitung zum 4S Lipo und XT90 Stecker / mit 43 Gramm

GR-24 mit 19,2 Gramm


HD GO PRO Black 3 mit 75,6 Gramm

Graupner Vario GPS mit 18,8 Gramm

LIPO 4S / 6500mAh / 90C im Hardcase mit ca. 580 Gramm
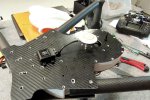
Fortsetzung - 21.11.2013 - so einiges ist gekommen...... und mal GROB hingerichtet....


Ankunft des Spyders


FPV CAM mit 24,4 Gramm

Erstes Probeliegen der Komponenten

TBS Greenhorn 5,8GHZ / 25MW mit 7,2 Gramm

Gimbal check und Lipo Platztsuche

4x Maytech Regler mit 183 Gramm

Schraubenzeugs zur Armverstellung mit 65 Gramm - verwende ich nicht!


Kurze Ausleger mit 38 Gramm

RGB LED Steuerung mit 6 Gramm

Sonstige Schrauben des Kopters mit 126,6 Gramm

Graupner Prop 12" mit 21,4 Gramm



MARK 3 OSD mit Kabel etc..... 88 Gramm

Sprayen der FRONT Motorbefestigungen - in ORANGE


Lange Ausleger mit 78 Gramm
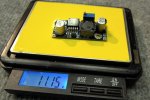
Spannungsregler mit Filter, 11,1 Gramm

Motor mit Kabel (lang), 136 Gramm

LCD Monitor mit Diversity Empfang 5,8GHZ

Gimbaled Befestigungs Check

Antennchen

THE KOPTER

Teile für in die Rohre, 56,3 Gramm
Fortsetzung - 22.11.2013 - GPS in der Haube eingepasst, Graupner GPS oben montiert und alle Naza Teile mal angebracht und sortiert.... morgen kommen Regler dran, Lauftest und Montage...


Holzprop Test

Habue mit Gimbal


LED Befestigung leicht angewinkelt um es besser von unten zu sehen


Gimbal Befestigung

2x Antennenröhrchen nach unten und quer (Data Downlink und Graupner GR-24)

Anprobe

GPS im Deckel ausgeschnitten

GPS Graupner und GPS Naza
Fortsetzung - 23.11.2013 - Motoren eingebaut, Drehrichtungen geprüft, LED Leitungen (wird 5V als RGB Steuerung) gelegt und mit einem TT Ball eine Leuchtkuppel für den unteren Motorträger gebastelt - jetzt brauche ich nur noch neue weiße Bälle, die waren heute nicht aufzutreiben. Der Innenraum füllt sich.

Erste Kabel kommen rein


TT Bälle als Leuchtkugel umgebaut und eingeklebt, denn die offenen "Löcher" beim X4 gehen gar nicht!!!!!

Fortsetzung - 24.11.2013 - LED Elektronik eingebaut, Spannungswandler / Filter 5V für LED und Greenhorn 5.8GHZ - sonst noch mal alles durchgeschaut, FB kontrolliert, Drehrichtung etc. Die Tage soll noch der Rest kommen dann wird Kompass kalibriert und der erste Flug steht an.

FPV KAM in der Nase - wird noch schwarz lackiert dann sieht man die kaum

Halterung einlaminiert

LED Blink Blink


FPV Cam in der Nase
FPV Cam ist in der Haube.... das passt sehr gut, Halter ist einlaminiert.









Video:
Einmal Standgas und 1x 60 %
http://www.youtube.com/watch?v=9jz1kIw6rLI&feature=youtube_gdata
Thorsten
BJ67
verheiratet
2x Kids (Jungs 8/9)
1x Windhund
Bin seit 20 Jahren im Fotobusiness (Sport)
Seit Ewigkeiten am RC bauen, mit Schwerpunkt Autos, bin 1/8er Nitro gefahren, 1/5er Truck und TW – wir haben glücklicherweise eine tolle RC Strecke am Hockenheimring. Fahre RC Boote (Jet Antrieb und so), dann MINI-Z seit 3-4 Jahren aktiv, wir haben eine sehr große Bahn (74 Meter Strecke) und daraus ist auch ein Online-Shop entstanden. Mittlerweile so groß das wir so um die 5000 Pakete per Jahr versenden – überwiegend Mini-Zs.
Fliegen mache ich auch, muss aber zugeben das mir da die Übung wieder fehlt und ich kein so begnadeter Flieger bin wie es beim Autofahren klappt... da bin sehr deutlich besser......
So lange Rede... ich hatte vor ZIG Jahren mal mit Y6 Koptern von Q4, Baseframe, AHM etc angefangen noch mit MK und 1H4 Steuerungen.... das war irgendwie alles experimentell wenn ich mir die NAZAs zum Beispiel jetzt anschaue.....
Wen es interessiert – ALTE Bilder vom zusammenfrickeln – aus 2010...
http://www.youtube.com/copterflight
http://www.wood-slot.com/okto/index.html
http://www.wood-slot.com/Y6-400/index.html
http://www.wood-slot.com/Y6-800/index.html
http://www.wood-slot.com/Y6600Neu/index.html
Dann habe ich jetzt wieder Interesse und mich in einiges eingelesen, das ist aber soooo viel und es ist soooo schwer das alles in kurzer Zeit zu filtern... puhhhh mir fehlen die Jahre nichts machen.... also habe ich mich hier angemeldet und hoffe das mir vielleicht doch bei der ein oder anderen zum 1000ten mal gestellten Frage geholfen wird.....
Zuerst war der TBS Diso Pro in der sehr engen Auswahl.... dann aber wurde es der
Sky Hero Spyder 700er – zuerst mal als X4 (später als X8) mir gefallen die SKY-Heros einfach... wobei ich schon immer der Y Fan war..... da kommt noch einer
mit Xoar Props 12x5 und oder Graupnern.....
4S / 14,8V im Moment 6400mAh / 90C... 590gr.
KopterWorx KW4 Pro / 700KV
Maytech MT40A-OPTO-V1
Naza-M V2 mit GPS
Naza OSD M2
Zenmuse für GoPro
Hero3
FPV CAM extra
5,8GHZ AV TX / RX mit Monitor
Bipol Antennen
Graupner MX-20 mit GR-24 / SUM / und dem tollen Telemetrieteilchen
LED RGB Lichtleisten über 2 Kanäle....
Was ich noch einbauen will ist das Naza Data Link Zeugs, das ist ja wohl noch nicht legal in Germany. Das Waypointfliegen ist ein nettes Feature das ich für den Einsatzzweck durchaus gebrauchen kann (wiederkehrende gleiche Aufnahmen)
Einiges liegt schon auf dem Tisch und ich warte auf den Rest.
Was ich im Kopf hab ist ein leichteres Landegestell das hochklappt....
Ein Deckel aus Lexan der um einige leichter sein muss als das CFK Teil.... (ich habe da jemanden der hat mir schon einiges gemacht)
Die Batteriehalterung will ich ändern um das Gimb direkt an die untere Platte zu schrauben und um die Batterien mit einem Einschub zu versehen.... zum schnellen wechseln und für sicheren Halt.
Dank der TOLLEN Anleitungen hier habe ich die MX-20 soweit eingerichtet das auf der Naza Software alles geht..... noch 100% steige ich nicht durch..... früher hatte ich Spektrum und seither nur Pistolenfunken in der Hand
Danke Autoren!
A1 // Den ersten Ausfall? gibt es schon zu vermelden, ausgepackt und angeschlossen... so schaust es aus... oder ist das normal?!?!!? TON mal laut machen.
http://www.youtube.com/watch?v=nFAIg1-6wY0&feature=youtube_gdata
A2 // ERLEDIGT // Eine Frage ist vorhin aufgetaucht..... die V2 / LED blinkt 2x GRÜN und 3x ROT – klar kein Sat in der Werkstatt aber was bedeutet Sticks sind nicht zentriert? Ist natürlich in allen 3 Modi so....
Die Sticks sind alle auf Null und Throttle ganz unten bei -100.
Wo ist der Fehler?
A3 // Das Gimbal Zenmuse für die GOPRO... wenn es dann geht... kann man eigentlich denn Rollausgleich AUSSCHALTEN..... also über die Funke auf NULL schalten das die KAM die Bewegungen des Kopters mitmacht? Das wäre was, denn den immer geraden Horizont brauche ich nicht.
Schönen Abend
Thorsten
BAUBERICHT – Start 14.11.2013
Graupner Teile, 12 K Empfänger etc.
HD GO PRO 3 Black
XT 90 Stecker
GoPro mit Zenmuse
Naza V2 GPS
Stromverteiler
Fortsetzung - 17.11.2013 - leider fehlen noch die wichtigen Bauteile, also habe ich mal die Funke eingestellt und alles "updatet". Etwas frustrierend wie schlecht das bei Graupner gelöst ist. Anyway alles sollte jetzt theoretisch gehen....
Kann wer noch was zu A3 sagen, gibts da ein Trick?
Naza V2 GPS mit 99,3 Gramm
Stromverteilem mit Zuleitung zum 4S Lipo und XT90 Stecker / mit 43 Gramm
GR-24 mit 19,2 Gramm
HD GO PRO Black 3 mit 75,6 Gramm
Graupner Vario GPS mit 18,8 Gramm
LIPO 4S / 6500mAh / 90C im Hardcase mit ca. 580 Gramm
Fortsetzung - 21.11.2013 - so einiges ist gekommen...... und mal GROB hingerichtet....
Ankunft des Spyders
FPV CAM mit 24,4 Gramm
Erstes Probeliegen der Komponenten
TBS Greenhorn 5,8GHZ / 25MW mit 7,2 Gramm
Gimbal check und Lipo Platztsuche
4x Maytech Regler mit 183 Gramm
Schraubenzeugs zur Armverstellung mit 65 Gramm - verwende ich nicht!
Kurze Ausleger mit 38 Gramm
RGB LED Steuerung mit 6 Gramm
Sonstige Schrauben des Kopters mit 126,6 Gramm
Graupner Prop 12" mit 21,4 Gramm
MARK 3 OSD mit Kabel etc..... 88 Gramm
Sprayen der FRONT Motorbefestigungen - in ORANGE
Lange Ausleger mit 78 Gramm
Spannungsregler mit Filter, 11,1 Gramm
Motor mit Kabel (lang), 136 Gramm
LCD Monitor mit Diversity Empfang 5,8GHZ
Gimbaled Befestigungs Check
Antennchen
THE KOPTER
Teile für in die Rohre, 56,3 Gramm
Fortsetzung - 22.11.2013 - GPS in der Haube eingepasst, Graupner GPS oben montiert und alle Naza Teile mal angebracht und sortiert.... morgen kommen Regler dran, Lauftest und Montage...
Holzprop Test
Habue mit Gimbal
LED Befestigung leicht angewinkelt um es besser von unten zu sehen
Gimbal Befestigung
2x Antennenröhrchen nach unten und quer (Data Downlink und Graupner GR-24)
Anprobe
GPS im Deckel ausgeschnitten
GPS Graupner und GPS Naza
Fortsetzung - 23.11.2013 - Motoren eingebaut, Drehrichtungen geprüft, LED Leitungen (wird 5V als RGB Steuerung) gelegt und mit einem TT Ball eine Leuchtkuppel für den unteren Motorträger gebastelt - jetzt brauche ich nur noch neue weiße Bälle, die waren heute nicht aufzutreiben. Der Innenraum füllt sich.
Erste Kabel kommen rein
TT Bälle als Leuchtkugel umgebaut und eingeklebt, denn die offenen "Löcher" beim X4 gehen gar nicht!!!!!
Fortsetzung - 24.11.2013 - LED Elektronik eingebaut, Spannungswandler / Filter 5V für LED und Greenhorn 5.8GHZ - sonst noch mal alles durchgeschaut, FB kontrolliert, Drehrichtung etc. Die Tage soll noch der Rest kommen dann wird Kompass kalibriert und der erste Flug steht an.
FPV KAM in der Nase - wird noch schwarz lackiert dann sieht man die kaum
Halterung einlaminiert
LED Blink Blink
FPV Cam in der Nase
FPV Cam ist in der Haube.... das passt sehr gut, Halter ist einlaminiert.
Video:
Einmal Standgas und 1x 60 %
http://www.youtube.com/watch?v=9jz1kIw6rLI&feature=youtube_gdata
Anhänge
-
 172,1 KB Aufrufe: 46
172,1 KB Aufrufe: 46
Zuletzt bearbeitet:









