
Guten Abend an alle hier.
Möchte mich und mein Projekt mal vorstellen. Bin 33 Jahre alt und Prozessleittechniker / Pyrotechniker von Beruf.
Habe mich letztes Jahr im Dezember entschieden mir einen Hexacopter zuzulegen und als „alten Bastler“ kam da nur ein Bausatz oder alles Einzelkomponenten für mich in Frage…
Für mich klang mein Setup stimmig aber ich wurde dann schnell eines besseren belehrt….
Setup:
Frame: ATG X6 700 Dual
Motor: RCtimer HP4215 630 kv
Regler: Turnigy Multistar 45amp ESC (OPTO)
Verkabelung: Power Supply und Motorkabe 12AWG
Prop: 1 Setup 14*4,7
2 Setup 11*5,5
Steuerung: DJI Naza V2 + GPS
Rc: Graupner Mx-20
Lipo: 2 x 6S White line 5000ma
Einstellwerte Original für Hexacopter ( DJI Naza )
Pitch Roll Yaw Vertical
Basic Gain 125% 125% 100% 100%
Remote Adjust INH INH INH INH
Attitude Gain 125% 125%
Remote Adjust INH INH
Also nun zum Anfang:
Copter mit den Kumpels im Hobbykeller zusammengebaut, Graupner programmiert ( GPS/Atti/Failsafe usw….) Akkus aufgeladen und ab auf die Wiese…
Nachdem ich als „1 A“ ( 1 A Bruchpilot ) Pilot natürlich keine Anleitung fürs Naza lesen muss is sowieso klar *hahaha*
Also Start 1 ging mal total in die Hose !!
Naja wer lesen kann is klar im Vorteil…
Alles kalibriert, GPS usw… Und als der Hexacopter dann endlich mal flog und auch so halbwegs stabil in der Luft stand ist er mir nach ca. 3 Minuten im Sturzflug mit einem rauchenden Motor entgegen gekommen..
Tja nach weiteren Recherchen im Internet bin ich dann auf eine Seite gekommen wo man sein Setup überprüfen kann ob das ganze überhaupt zusammen passt.. und siehe da !! Passt nicht !!
Bei meinem Frame mit einem Abfluggewicht von 4200 gr., 14*4,7 Props, den 45A Reglern und den HP4215 Motoren… Nehmen die Motoren bei Volllast ca 900Watt auf jedoch sind sie nur für ca 450Watt ausgelegt.. Was zur folge hat / hatte das der/die Motoren hoffnungslos überhitzten… Der Regler gibt beim Schweben zwar nur 21% aus aber bei einem Flugmanöver war dann Schluss mit lustig… 1 Motor rauchte war heiß und die Kupferwicklungen waren auch dunkler als die der anderen Motoren / Copter runter / Prop und 2 Rohre gebrochen…
Tja thats life") Jedoch dreht er noch einwandfrei. Das Rauchen kam von dem heiß gewordenem Isolierlack der Wicklungen.
Jedoch dreht er noch einwandfrei. Das Rauchen kam von dem heiß gewordenem Isolierlack der Wicklungen.
Also heute mal neue Rohre ( für die Arme ) und neue Props 11*5,5 besorgt, verbaut und getestet…
Start:
Fernbedienung einschalten,
Akku anstecken,
Manual/Atti/GPS Atti Schalter mehrmals betätigt und dann in den Kalibriermodus gewechselt
Den Copter / Naza kalibriert
Dann auf GPS Signal gewartet
Und dann im GPS ATTI Modus abgehoben und auf ca 2-3 Meter Höhe geschwebt…
Ging ca. 2 Minuten gut dann schmierte er mir nach Links ab und der Motor am linken Arm blieb stehen und ging dann wieder an… Der Motor stand so lange das es 3 Leute inklusive mir genau gesehen haben das er kurz stehengeblieben ist….
Copter down…. Aber ohne Schäden
Dann wieder Arme ausgerichtet und von vorne..
Nach dem Abheben mit den 11*5,5er Props hervorragend wieder ins Schweben und dann auf 3-4 Meter Höhe eine Flugmanöver getestet… Vor/Rück, Rechts/Links, drehen usw .. Dann das ganze noch mal etwas schneller und meiner Meinung nach super Ansprechverhalten und super Stabilisierungsverhalten…
Dann ca 30 Sekunden Schwebemodus und plötzlich schmiert der Copter nach links und zwar so stark das er kopfüber landet um beim runterfliegen noch mal Schub gab…
Ergebnis… Motorhalterung und 2 Arme gebrochen…
Habe heute auch bemerkt dass eventuell ein Motor für einen Bruchteil von einer Sekunde stoppt… Bzw. der Regler das ansteuern eines Motors kurz unterbricht… jedenfalls war ein ruckeln / kurzes einmaliges stottern des Motors zu hören..
Zumindest hört es sich so an und der Copter wackelt kurz…
Habe nun einige Fragen an die Leute hier im Forum die sich gut auskennen und mir bei meinem Problem helfen können… Ich werde dann sie Lösung natürlich auch Schritt für Schritt erläutern…
1.) Muss ich die Multistarregler Kalibrieren ? Wenn ja wie ?
2.) Muss ich das rote Kabel zum Regler kappen obwohl er ein OPTO Regler ist ?
3.) Sind die Regler eventuell zu stark ausgelegt um die Motoren die erheblich weniger Strom benötigen sauber zu regeln ?
4.) Kann es sein das der eine Motor plötzlich aussetzt obwohl er ohne Propeller beim Test super und auch über eine längere Zeit reagiert hat und nicht mehr heißgelaufen ist
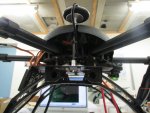
5.) Ist es ein Problem für die Naza das der Funkempfänger direkt ÜBER der Naza verbaut ist und die Antennenkabel direkt an der Naza vorbei gehen ?
6.) Wie lote ich den Schwerpunkt meines Copters aus ? Ich meine an den gegenüber liegenden Armen aufheben und austarieren is klar und ohne Landegestell und ohne Akkus is der Schwerpunkt auch ziemlich mittig aber wie sehr / wie weit verschiebt er sich nach anbringen der Akkus nach unten ?
7.) Wie kann ich bei der Naza V2 über einen Schalter An der MX20 den Coming home Modus aktivieren ohne mit dem Sender Aus in den Failsafe zu kommen ?
Würde mich sehr über Tipps bzw Lösungsvorschläge freuen..
GLG und noch einen schönen Abend
Möchte mich und mein Projekt mal vorstellen. Bin 33 Jahre alt und Prozessleittechniker / Pyrotechniker von Beruf.
Habe mich letztes Jahr im Dezember entschieden mir einen Hexacopter zuzulegen und als „alten Bastler“ kam da nur ein Bausatz oder alles Einzelkomponenten für mich in Frage…
Für mich klang mein Setup stimmig aber ich wurde dann schnell eines besseren belehrt….
Setup:
Frame: ATG X6 700 Dual
Motor: RCtimer HP4215 630 kv
Regler: Turnigy Multistar 45amp ESC (OPTO)
Verkabelung: Power Supply und Motorkabe 12AWG
Prop: 1 Setup 14*4,7
2 Setup 11*5,5
Steuerung: DJI Naza V2 + GPS
Rc: Graupner Mx-20
Lipo: 2 x 6S White line 5000ma
Einstellwerte Original für Hexacopter ( DJI Naza )
Pitch Roll Yaw Vertical
Basic Gain 125% 125% 100% 100%
Remote Adjust INH INH INH INH
Attitude Gain 125% 125%
Remote Adjust INH INH
Also nun zum Anfang:
Copter mit den Kumpels im Hobbykeller zusammengebaut, Graupner programmiert ( GPS/Atti/Failsafe usw….) Akkus aufgeladen und ab auf die Wiese…
Nachdem ich als „1 A“ ( 1 A Bruchpilot ) Pilot natürlich keine Anleitung fürs Naza lesen muss is sowieso klar *hahaha*
Also Start 1 ging mal total in die Hose !!
Naja wer lesen kann is klar im Vorteil…
Alles kalibriert, GPS usw… Und als der Hexacopter dann endlich mal flog und auch so halbwegs stabil in der Luft stand ist er mir nach ca. 3 Minuten im Sturzflug mit einem rauchenden Motor entgegen gekommen..
Tja nach weiteren Recherchen im Internet bin ich dann auf eine Seite gekommen wo man sein Setup überprüfen kann ob das ganze überhaupt zusammen passt.. und siehe da !! Passt nicht !!
Bei meinem Frame mit einem Abfluggewicht von 4200 gr., 14*4,7 Props, den 45A Reglern und den HP4215 Motoren… Nehmen die Motoren bei Volllast ca 900Watt auf jedoch sind sie nur für ca 450Watt ausgelegt.. Was zur folge hat / hatte das der/die Motoren hoffnungslos überhitzten… Der Regler gibt beim Schweben zwar nur 21% aus aber bei einem Flugmanöver war dann Schluss mit lustig… 1 Motor rauchte war heiß und die Kupferwicklungen waren auch dunkler als die der anderen Motoren / Copter runter / Prop und 2 Rohre gebrochen…
Tja thats life
Jedoch dreht er noch einwandfrei. Das Rauchen kam von dem heiß gewordenem Isolierlack der Wicklungen. Also heute mal neue Rohre ( für die Arme ) und neue Props 11*5,5 besorgt, verbaut und getestet…
Start:
Fernbedienung einschalten,
Akku anstecken,
Manual/Atti/GPS Atti Schalter mehrmals betätigt und dann in den Kalibriermodus gewechselt
Den Copter / Naza kalibriert
Dann auf GPS Signal gewartet
Und dann im GPS ATTI Modus abgehoben und auf ca 2-3 Meter Höhe geschwebt…
Ging ca. 2 Minuten gut dann schmierte er mir nach Links ab und der Motor am linken Arm blieb stehen und ging dann wieder an… Der Motor stand so lange das es 3 Leute inklusive mir genau gesehen haben das er kurz stehengeblieben ist….
Copter down…. Aber ohne Schäden
Dann wieder Arme ausgerichtet und von vorne..
Nach dem Abheben mit den 11*5,5er Props hervorragend wieder ins Schweben und dann auf 3-4 Meter Höhe eine Flugmanöver getestet… Vor/Rück, Rechts/Links, drehen usw .. Dann das ganze noch mal etwas schneller und meiner Meinung nach super Ansprechverhalten und super Stabilisierungsverhalten…
Dann ca 30 Sekunden Schwebemodus und plötzlich schmiert der Copter nach links und zwar so stark das er kopfüber landet um beim runterfliegen noch mal Schub gab…
Ergebnis… Motorhalterung und 2 Arme gebrochen…
Habe heute auch bemerkt dass eventuell ein Motor für einen Bruchteil von einer Sekunde stoppt… Bzw. der Regler das ansteuern eines Motors kurz unterbricht… jedenfalls war ein ruckeln / kurzes einmaliges stottern des Motors zu hören..
Zumindest hört es sich so an und der Copter wackelt kurz…
Habe nun einige Fragen an die Leute hier im Forum die sich gut auskennen und mir bei meinem Problem helfen können… Ich werde dann sie Lösung natürlich auch Schritt für Schritt erläutern…
1.) Muss ich die Multistarregler Kalibrieren ? Wenn ja wie ?
2.) Muss ich das rote Kabel zum Regler kappen obwohl er ein OPTO Regler ist ?
3.) Sind die Regler eventuell zu stark ausgelegt um die Motoren die erheblich weniger Strom benötigen sauber zu regeln ?
4.) Kann es sein das der eine Motor plötzlich aussetzt obwohl er ohne Propeller beim Test super und auch über eine längere Zeit reagiert hat und nicht mehr heißgelaufen ist
5.) Ist es ein Problem für die Naza das der Funkempfänger direkt ÜBER der Naza verbaut ist und die Antennenkabel direkt an der Naza vorbei gehen ?
6.) Wie lote ich den Schwerpunkt meines Copters aus ? Ich meine an den gegenüber liegenden Armen aufheben und austarieren is klar und ohne Landegestell und ohne Akkus is der Schwerpunkt auch ziemlich mittig aber wie sehr / wie weit verschiebt er sich nach anbringen der Akkus nach unten ?
7.) Wie kann ich bei der Naza V2 über einen Schalter An der MX20 den Coming home Modus aktivieren ohne mit dem Sender Aus in den Failsafe zu kommen ?
Würde mich sehr über Tipps bzw Lösungsvorschläge freuen..
GLG und noch einen schönen Abend
Anhänge
-
 931,5 KB Aufrufe: 25
931,5 KB Aufrufe: 25 -
 892,4 KB Aufrufe: 26
892,4 KB Aufrufe: 26 -
 799,8 KB Aufrufe: 25
799,8 KB Aufrufe: 25 -
 754,5 KB Aufrufe: 20
754,5 KB Aufrufe: 20 -
 728,5 KB Aufrufe: 22
728,5 KB Aufrufe: 22 -
 789,9 KB Aufrufe: 21
789,9 KB Aufrufe: 21 -
 838,6 KB Aufrufe: 23
838,6 KB Aufrufe: 23 -
 1,8 MB Aufrufe: 24
1,8 MB Aufrufe: 24 -
 814,6 KB Aufrufe: 24
814,6 KB Aufrufe: 24 -
 1 MB Aufrufe: 32
1 MB Aufrufe: 32 -
 908,9 KB Aufrufe: 27
908,9 KB Aufrufe: 27 -
 789,7 KB Aufrufe: 25
789,7 KB Aufrufe: 25 -
 943,9 KB Aufrufe: 23
943,9 KB Aufrufe: 23 -
 721 KB Aufrufe: 25
721 KB Aufrufe: 25 -
 832,8 KB Aufrufe: 30
832,8 KB Aufrufe: 30 -
 950,5 KB Aufrufe: 34
950,5 KB Aufrufe: 34 -
 954 KB Aufrufe: 21
954 KB Aufrufe: 21 -
 813,3 KB Aufrufe: 25
813,3 KB Aufrufe: 25 -
 837,3 KB Aufrufe: 21
837,3 KB Aufrufe: 21 -
 899,8 KB Aufrufe: 24
899,8 KB Aufrufe: 24 -
 962 KB Aufrufe: 27
962 KB Aufrufe: 27 -
 948,6 KB Aufrufe: 35
948,6 KB Aufrufe: 35 -
 904,1 KB Aufrufe: 29
904,1 KB Aufrufe: 29 -
 888,1 KB Aufrufe: 26
888,1 KB Aufrufe: 26 -
 912,5 KB Aufrufe: 19
912,5 KB Aufrufe: 19 -
 901,3 KB Aufrufe: 22
901,3 KB Aufrufe: 22 -
 947,6 KB Aufrufe: 20
947,6 KB Aufrufe: 20 -
 868,6 KB Aufrufe: 22
868,6 KB Aufrufe: 22 -
 673,9 KB Aufrufe: 25
673,9 KB Aufrufe: 25 -
 965,2 KB Aufrufe: 25
965,2 KB Aufrufe: 25
Zuletzt bearbeitet:



















