Hervorragend!
Marens Beispiel gefällt mir auch sehr gut.
Wie ich in meinem letzten Beitrag ewähnt habe, arbeiten die Limits ja sowohl als Limits, als auch als Skalierungsfaktoren, mit denen man Ungenauigkeiten in der Anlenkung verschiedener Ruder, welche aber gleich laufen sollten, ausgleichen kann.
Diese Funktionsmischung ist es, was mich etwas unglücklich macht.
Ich denke, die beste Lösung wäre es, eine getrennte Limit- und Skalierungsfunktion zu haben.
Für Freunde der bisherigen Methode sollte es dann möglich sein, die Skalierungsfunktion zu deaktivieren.
Ist diese deaktiviert, bezieht die Mischergewichtung sich wie bisher auf die Limits.
Bei aktivierter Skalierungsfunktion bezieht sich die Mischergewichtung dann auf die Skalierungsfunktion.
So kann ich mittels der Skalierungsfunktion die Ruder so einstellen, dass sie auch bei unterschiedlicher Anlenkungsgeometrie gleichmäßig laufen, und zwar nicht nur, wie bisher, getrennt für jede Ausschlagsrichtung, sondern für beide Ruder in alle Ausschlagsrichtungen.
Die Limits sind dann ausschließlich für die "mechanische" Servowegbegrenzung zuständig.
Habe ich jetzt eine Wölbklappe, in der das Servo schon stark aus der Mitte gedreht ist, weil ich nach unten viel mehr Ausschlag als nach oben brauche, stelle ich zuerst den Skalierungsfaktor ein. 100% Knüppelausschlag bedeuten z.B. 10mm Klappenausschlag nach oben. Das ist aber erstmal ok so, ich setze also einen Skalierungsfaktor von 100% für oben. 100% Knüppelausschlag nach unten bedeuten aber z.B. 40mm Klappenausschlag, weil die Anlenkungsgeometrie (mit Absicht) schief ist. Also setze ich hier einen Skalierungsfaktor von 25%. Ein 100% Mischer würde jetzt sowohl nach oben als auch nach unten 10mm Klappenausschlag erzeugen.
Den Butterflymischer gewichte ich jetzt mit 400%, so dass ich die vollen 40mm Klappenausschlag nach unten bekomme.
Jetzt kann ich noch die Limits auf z.B. 110% oben, und 110% (gemessen am normalen Servoweg bei 100% Mischer und 100% Skalierung) unten setzen, wenn hier z.B. die mechanischen Grenzen liegen. So habe ich noch ein wenig Freiraum zum Trimmen oder was auch immer.
Ich denke, diese Lösung würde allen hier im Thread versammelten Philosophien und Vorstellungen in idealer Weise entsprechen.
Ich habe gerade etwas interessantes gelesen hier:
http://rc-soar.com/opentx/setups/calib/calibration.htm
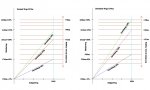
For flaps in F3X models: flaps on F3X gliders usually these have much more down travel than up. If you set the servo centre at the control surface neutral position, then mixer and diff values will not work predictably since the servo will have much more movement one side than the other. Fortunately you can achieve a linear setup quite simply:
1. set SUBTRIM so it's midway between MIN and MAX, i.e.
SUBTRIM ~= (MIN + MAX) / 2.
The response will be as the green line in the diagram above. (You may have to compromise a
little here, so that both flaps match up perfectly)
2. The control surface neutral will be incorrect. Fix this by applying a corrective fixed offset in
your Flap mix (add a mixer line with the MAX directive).
Wenn man getrennte Parameter für Limit und Skalierung nimmt, würde das auch diesen Prozess sehr vereinfachen.

")