Letzte Woche bin ich endlich dazu gekommen wieder etwas an meiner Camslide zu arbeiten.
Anhang anzeigen 110512
Als Schienen dienen 15x15 Aluprofile die an den Enden über eine Klemmvorrichtung fixiert werden.
Anhang anzeigen 110514
Sämtliche Elektronik inkl Akku sitzt jetzt am Schlitten, so bekomme ich unter dem Schlitten etwas mehr Masse. Ich hatte seit der letzten Variante auch noch mit V-Kugellagern experimentiert und mich letztendlich für weißen Filz entschieden (den man unten an die Stuhlbeine klebt).
Anhang anzeigen 110513
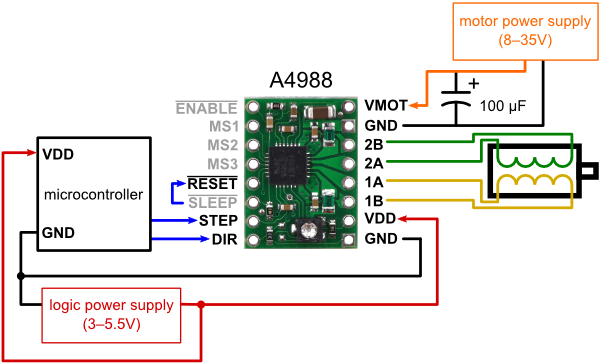
Focus und Auslöser werden über den Mikrocontroller gesteuert werden.
Anhang anzeigen 110511
Aktuell sind noch provisorisch Taster als Endschalter verbaut, werden aber bald durch richtige Endschalter ersetzt.
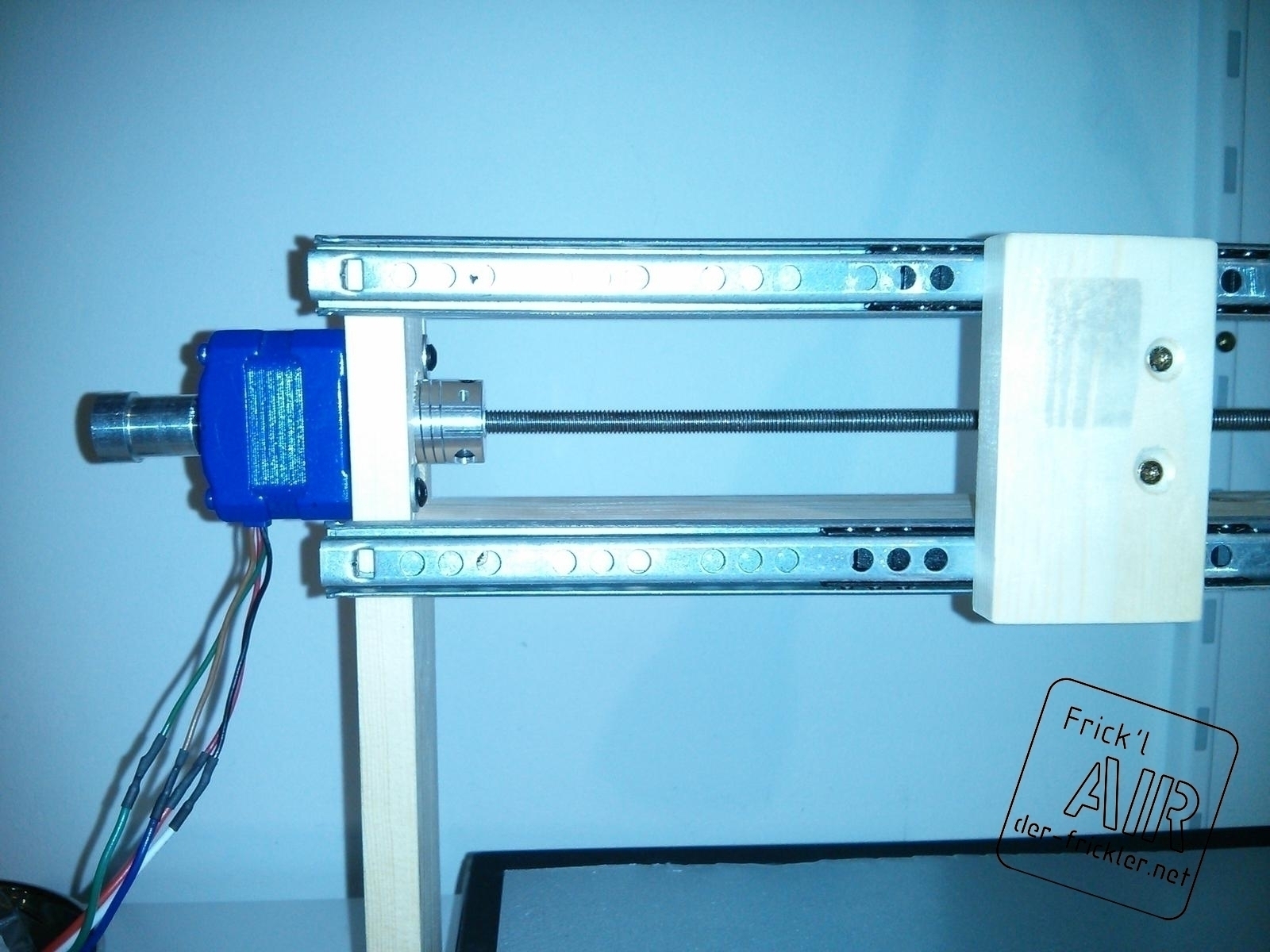
Anhang anzeigen 110510
Hier sieht man die Zahnriemenführung etwas besser
Specs:
DSLR: Nikon D90
Stativkopf: Manfrotto 496RC2
Akku: 3s800 Lipo
Motor: 35/HB3302 0,8A/1,8°
Treiber: GY-4988
Controller: Arduino Nano V3 mit Bluetooth und Crius V1.2 LCD
GUI: AndroidApp
Funktion:
1. Einschalten über Kipschalter am Schlitten
2. System initialisiert
3. Verbinden mit dem Android App
4. Referenzfahrt über App einleiten (variable länge der Aluprofile möglich) 5. Jetzt können die Verschiedenen Modi gestartet werden:
Automatik: die Kamera macht über X Minuten, Y Fotos auf Z% der Strecke
Zeitraffer: die Kamera macht alle X Sekunden ein Foto und gesamt Y Stück
Manuelles Verfahren: X Schritte in Richtung Y mit Schrittmodus Z (1,2,4,8,16)
Foto machen
Bei allen Modis könnte auch noch Anfangsverzögerung, Belichtungszeit und Focuszeit eingestellt werden.
Wie gehts weiter?
Da ich sie herumliegen habe und gern bei einem Projekt einsetzten würde, wird der Arduino einem Spark Core weichen.
So kann man sich via WLAN verbinden und anstatt der native App soll javascript am sparkcore laufen.
Jetzt hätte ich aber noch eine Frage:
Könnt ihr mir ein Tool empfehlen mit dem ich die Bilder relativ komfortabel umwandeln kann?


")