
Hallo alle miteinander!
Da dies mein erster Post ist, möchte ich mich kurz vorstellen. Mein Name ist Sascha, ich wohne seit mehreren Jahren im Sonnigen Italien, bin etwas über 30 und da hier das Wetter meistens gut ist, habe ich beschlossen, mich mit dem "Fliegen" zu beschäftigen, da mich das schon immer sehr interessiert hat.
Ich bin ein totaler Anfänger was all das hier angeht und habe sogut wie keinerlei Ahnung, kann aber nach Anleitung ein bischen Löten und Bastel auch sonst recht gerne.
Mein Ziel ist es, eines Tages eine "Go Hero 2" für PPV in die Luft zu bringen, aber momentan wäre ich erstmal froh, wenn ich überhaupt irgendwas nach oben bringe
Gut, nachdem ich weiss, dass man mir nur helfen kann, wenn ich genügend Informationen liefere, Poste ich hier am besten mal alles von Anfang an.
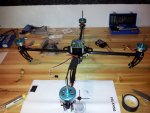
Bisher habe ich mir folgende Teile besorgt (dies nach gefühlten 3.123.156 Posts, die ich im Internet zum Thema gelesen habe) und das ganze, wie in den Bildern anschliessend gezeigt, hoffentlich richtig zusammengebaut.
Struktur:
Gewicht: 240GR
Länge: 50CM
Material: CARBON
Motorhalterungen: Alluminium
Regolatoren:
Gewicht: 22g
Grösse: 24x52x6mm
Zellen: 2-3S (Auto Detect)
Max Spannung: 25A
Typ: Brushless
Burst: 30A
BEC: 3A
Motoren:
Benötigte Voltzahl: 11.1V
Empfohlene Batterie Kapazität: 1300mAh +
Empfohlene Propeller: 11x3.8 oder 11x4.7
Max 18A (mit 11x4.7 prop)
Tragfähigkeit: 1000g
No Load Current: 1.4A
Shaft: 4M
Gewicht: 78g
Durchmesser: 41mm
Gesamtlänge: 77mm
Kv: 750rpm/v
Board:
Grösse: 50.5mm x 50.5mm x 23.5mm
Gewicht: 14.5 gram
IC: Atmega328PA
Input: 3.3-5.5V
Signal vom Empfänger: 1520us (4 Kanäle)
Signal zum ESC: 1520us
Batterie:
Gewicht: 204 G
Abmessungen: 104x35x27mm
Kapazität: 2200MA (40C - MAX 50C für 10 Sekunden)
Fernbedienung:
Turnigy THY9X
















Momentan bin ich also soweit, dass ich die LIPOS geladen habe, die Fernbedienung "Gebunden" habe (die Kabel habe ich noch nicht festgemacht, da ich erstmal abwarten wollte, ob alles funktioniert, oder ob ich was falsch gemacht habe) und verstanden habe, wie ich das Board aktiviere.
Das erste was ich nun gemacht habe ist, den "YAW" Regler auf 0 zu drehen, dann die Bedienung auf "Vollgass zu stellen", danach den Copter mit Strom zu versorgen, dass dreimalige Piepsen abzuwarten, dann das Gas wegzunehmen und anschliessend wieder auszuschalten. Danach habe ich den Regler wieder etwas hoch gestellt und das Board wieder mit Strom versorgt. Ich würde Lügen wenn ich sagen würde, dass ich verstanden habe "WARUM" ich das gemacht habe, aber zumindest hab ich verstanden, dass ich es machen muss
Zum Aktivieren (bis ich das verstanden hatte, sind gut 2 Stunden vergangen) bin ich nun mit dem Steuer nach links und dann nach Rechts - und sobald die LED dann Rot war hab ich mal vorsichtig Gas gegeben, wärend ich das Teil festgehalten habe.
Momentan reagiert es irgendwie zwar auf die Fernbedinung (wenn auch nicht wie gewollt), wobbelt dabei extrem rum (die Motoren fahren kurz alle extren schnell hoch und dann geht einer oder zwei aus, die anderen ziehen extrem stark, dann gehen die wieder aus und die anderen beiden gehen an, etc.). Ich hab auch versucht, die beiden Regler mal komplett nach links, rechts oder mittig zu stellen, aber da gibt es keinen Unterschied. Der Copter würde mir momentan wohl die Halbe Bude einreissen, wenn ich ihn loslasse, ich hätte nicht erwartet, dass so ein Teil so extrem viel Zugkraft hat.
So, bishierhin bin ich gekommen und nun bin ich unsicher, wie es weiter geht, da ich zwar ne Menge Anleitungen gelesen habe, aber diese nicht wirklich verstanden habe.
Ach ja, so habe ich das ganze angeschlossen:




Die aktuelle Firmware ist die 4.7 fuer "X", wurde aber vom Verkäufer aufgespielt. Ich habe versucht, mal selbst zu flashen, komme aber nicht weiter, da ich keinen Treiber fuer XP habe und nicht mal weiss, wonach ich da genau suchen muss. Das Gerät schaut wie folgt aus:


Entschludigt mich bitte für den langen Text und die vielen Bilder, aber ich dachte mir, dass ich gleich mit allen Informationen rausrücke die mir in den Sinn kommen.
Vielen Dank schon mal im vorraus für die Hilfe - und Danke auch für das Lesen meines Kauderwelschs
Da dies mein erster Post ist, möchte ich mich kurz vorstellen. Mein Name ist Sascha, ich wohne seit mehreren Jahren im Sonnigen Italien, bin etwas über 30 und da hier das Wetter meistens gut ist, habe ich beschlossen, mich mit dem "Fliegen" zu beschäftigen, da mich das schon immer sehr interessiert hat.
Ich bin ein totaler Anfänger was all das hier angeht und habe sogut wie keinerlei Ahnung, kann aber nach Anleitung ein bischen Löten und Bastel auch sonst recht gerne.
Mein Ziel ist es, eines Tages eine "Go Hero 2" für PPV in die Luft zu bringen, aber momentan wäre ich erstmal froh, wenn ich überhaupt irgendwas nach oben bringe
Gut, nachdem ich weiss, dass man mir nur helfen kann, wenn ich genügend Informationen liefere, Poste ich hier am besten mal alles von Anfang an.
Bisher habe ich mir folgende Teile besorgt (dies nach gefühlten 3.123.156 Posts, die ich im Internet zum Thema gelesen habe) und das ganze, wie in den Bildern anschliessend gezeigt, hoffentlich richtig zusammengebaut.
Struktur:
Gewicht: 240GR
Länge: 50CM
Material: CARBON
Motorhalterungen: Alluminium
Regolatoren:
Gewicht: 22g
Grösse: 24x52x6mm
Zellen: 2-3S (Auto Detect)
Max Spannung: 25A
Typ: Brushless
Burst: 30A
BEC: 3A
Motoren:
Benötigte Voltzahl: 11.1V
Empfohlene Batterie Kapazität: 1300mAh +
Empfohlene Propeller: 11x3.8 oder 11x4.7
Max 18A (mit 11x4.7 prop)
Tragfähigkeit: 1000g
No Load Current: 1.4A
Shaft: 4M
Gewicht: 78g
Durchmesser: 41mm
Gesamtlänge: 77mm
Kv: 750rpm/v
Board:
Grösse: 50.5mm x 50.5mm x 23.5mm
Gewicht: 14.5 gram
IC: Atmega328PA
Input: 3.3-5.5V
Signal vom Empfänger: 1520us (4 Kanäle)
Signal zum ESC: 1520us
Batterie:
Gewicht: 204 G
Abmessungen: 104x35x27mm
Kapazität: 2200MA (40C - MAX 50C für 10 Sekunden)
Fernbedienung:
Turnigy THY9X
Momentan bin ich also soweit, dass ich die LIPOS geladen habe, die Fernbedienung "Gebunden" habe (die Kabel habe ich noch nicht festgemacht, da ich erstmal abwarten wollte, ob alles funktioniert, oder ob ich was falsch gemacht habe) und verstanden habe, wie ich das Board aktiviere.
Das erste was ich nun gemacht habe ist, den "YAW" Regler auf 0 zu drehen, dann die Bedienung auf "Vollgass zu stellen", danach den Copter mit Strom zu versorgen, dass dreimalige Piepsen abzuwarten, dann das Gas wegzunehmen und anschliessend wieder auszuschalten. Danach habe ich den Regler wieder etwas hoch gestellt und das Board wieder mit Strom versorgt. Ich würde Lügen wenn ich sagen würde, dass ich verstanden habe "WARUM" ich das gemacht habe, aber zumindest hab ich verstanden, dass ich es machen muss
Zum Aktivieren (bis ich das verstanden hatte, sind gut 2 Stunden vergangen) bin ich nun mit dem Steuer nach links und dann nach Rechts - und sobald die LED dann Rot war hab ich mal vorsichtig Gas gegeben, wärend ich das Teil festgehalten habe.
Momentan reagiert es irgendwie zwar auf die Fernbedinung (wenn auch nicht wie gewollt), wobbelt dabei extrem rum (die Motoren fahren kurz alle extren schnell hoch und dann geht einer oder zwei aus, die anderen ziehen extrem stark, dann gehen die wieder aus und die anderen beiden gehen an, etc.). Ich hab auch versucht, die beiden Regler mal komplett nach links, rechts oder mittig zu stellen, aber da gibt es keinen Unterschied. Der Copter würde mir momentan wohl die Halbe Bude einreissen, wenn ich ihn loslasse, ich hätte nicht erwartet, dass so ein Teil so extrem viel Zugkraft hat.
So, bishierhin bin ich gekommen und nun bin ich unsicher, wie es weiter geht, da ich zwar ne Menge Anleitungen gelesen habe, aber diese nicht wirklich verstanden habe.
Ach ja, so habe ich das ganze angeschlossen:
Die aktuelle Firmware ist die 4.7 fuer "X", wurde aber vom Verkäufer aufgespielt. Ich habe versucht, mal selbst zu flashen, komme aber nicht weiter, da ich keinen Treiber fuer XP habe und nicht mal weiss, wonach ich da genau suchen muss. Das Gerät schaut wie folgt aus:
Entschludigt mich bitte für den langen Text und die vielen Bilder, aber ich dachte mir, dass ich gleich mit allen Informationen rausrücke die mir in den Sinn kommen.
Vielen Dank schon mal im vorraus für die Hilfe - und Danke auch für das Lesen meines Kauderwelschs
Anhänge
-
 148,3 KB Aufrufe: 17
148,3 KB Aufrufe: 17

