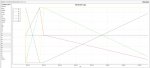
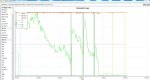
Bezüglich Log-Datei habe ich gestern herausgefunden, dass ich es durch einen falschen programmierten logischen Schalter kurz nach dem Motorstart ausgeschaltet habe. Deshalb auch die unsinnigen Daten.
Sorry, ich verstehe es immer noch nicht was du abgeschaltet hast was diese wirren Werte erzeugen soll???
Ich neige eher zu den Ausführungen von @strgaltdel, dass die Ursache im BEC vom Regler zu suchen ist.
Ich stimme nicht zu, schließe es aber auch nicht aus, wenn ich mich recht erinnere hast du einen YEP Regler ?
Die YEP haben soweit ich weis alle 6A und 12A BEC zumindest ab 80A aufwärts diese verwende selbst und nur diese, aus eigener Erfahrung weis ich das das BEC echt brauchbar ist, auch bei Quälereien, was natürlich einen Defekt oder Fertigungsfehler nicht ausschließt.
Das kann man aber testen.
Eine weitere Ungereimtheit konnte ich bei meinen Untersuchungen feststellen und zwar verglich ich die Empfindlichkeit des verwendeten X8R-Empfängers mit 2 anderen. Dabei habe ich festgestellt, dass bei diesem die getestete Reichweite geringer war als die der beiden anderen. Nach einem Firmware-Update war dann die Reichweite bei allen Empfängern gleich.
Das schließe ich als Ursache aus, nach der Zeit die das Modell in der Luft war kannst du "unmöglich" so weit weg gewesen sein das dass eine Rolle spielt.
Um einem Stromversorgungsausfall zukünftig vorzubeugen, habe ich mir von Optiboard einen Ultra-Guard 430 besorgt. Damit sollte eigentlich eine hohe Ausfallsicherheit erreichbar sein.
Hab so ein ähnliches Teil von Scorpion in einem Modell mitgekauft und ausgebaut

Warum ?
Sag ich Dir... das Teil ist klein, leicht und funktionier auch gut, hält die Spannung bei 5V ziemlich exakt und ist sogar belastbar.
Alles vorteile, richtig und jetzt kommt ein nachteil Der Backup Guard wird aus zwei Lipo Zellen versorgt dann ist ein Spannungsregler eingebaut der die 5V liefert und das tut das Teil so lange bis die LIpos soweit entaden sind das die Spannung schlagartig zusammenbricht ohne Vorwarnung. Das bedeutet ich bekomme es durch meine Telemetrie nicht mit wenn die Spannung fällt, bei meinen Eneloop überwache ich die Spannung und lasse mir ansagen wenn meine Grenze von 5,2V unterschritten wird, wenn das passiert weis ich das etwas nicht stimmt und sehe zu das ich Lande um den Fehler zu suchen und zu beheben, mit dem Backup Guard passiert nur noch eins, Spannung bricht ein und die Komplette Empfangsanlage ist Tot = Absturz und das ohne Vorwarnung. Hoffe man kann so einigermaßen verstehen was ich meine.
Eine zweite RX Stromversorgung ist nie verkehrt, habe ich auch in allen meinen Seglern, allerdings verwende ich ganz normale 800mAh Eneloop Zellen und lasse diese sogar vom BEC "nachladen" besser bei Laune halten... Die Zellen werden einmal pro Jahr mit Externem Lader geladen und Entladen um zu sehen was diese noch können.
Die YEP Regler ab 80-120A können das alle, selbst mehrfach so im Einsatz bewusst ohne Schottky Diode.
Ich komme einfach nicht von deinem seltsamen Log weg und finde dafür keine Erklärung.
Versuche du mal etwas Licht in mein dunkel zu bringen.