
Shrediquette DLXm Replica Baubericht
- Themenstarter strippenpaul
- Beginndatum

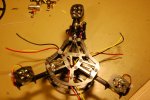
Gestern und heute hab ich mich um den Zusammmenbau des Tricopters gemacht. Die Motorgodeln habe ich erst mit Sekundenkleber auf den Cfk Rohren fixiert und im Anschluss mit 2Komponetenkleber verklebt. Am schwierigstens war es alles Lotgerecht zueinander auszurichten. Die Motorkabel hab ich verlängert und im Cfk Rohr verlegt. Das Servokabel wurde der Stecker ausgepinnt, durchgezogen und anschliessend wieder eingepinnt. Später kommt zusätzlich ein 5-10cm Servo Verlängerungskabel zum Einsatz.
Anhänge
-
 1,5 MB Aufrufe: 24
1,5 MB Aufrufe: 24 -
 1,5 MB Aufrufe: 21
1,5 MB Aufrufe: 21 -
 1,5 MB Aufrufe: 28
1,5 MB Aufrufe: 28
Hast Du die "Verzahnung" bei den vorderen Motorträgern weggelassen? Also sind die nur auf Stoss mit den senkrechten Haltern verklebt?
Ich folge Deinem Baubericht mit Spannung, die kleine steht auch auf meinem Wunschzettel und der 1:1 Plan ist auch schon gedruckt ... Aber erstmal muss an der MM6 weitergemacht werden")
Ich folge Deinem Baubericht mit Spannung, die kleine steht auch auf meinem Wunschzettel und der 1:1 Plan ist auch schon gedruckt ... Aber erstmal muss an der MM6 weitergemacht werden
Danke fürs Mitlesen, freut mich. Ich habe keine Verzahnung, die beiden senkrechten Teile sitzen sehr Stramm auf den Rohren. Diese wurden großflächig Verklebt und das obere Cfk Motorhalte Stück ist Stumpf mit Kleberaupe innen Verklebt. Ich habe ja nur nach Bildern nachgebaut. Aber soweit ich auf Wiliams Websight sehen kann, hat er auch keine Verzahnung. Ich hatte auch nie Kontakt mit William. Also lasse mich auch belehren wenn einer es besser weiß, bin über jeden Tip dankbar. Welche 1:1 Zeichnung meinst du?
Ich habe erst heute 12x M3x6 Linsenkopfschrauben, wie auch den Foto sichtbar, gegen Nylonschrauben M3x8 ausgetauscht. Die 12 Linsenkopf VA Schrauben auf die Waage waren gerade mal 4-5g also macht das nicht viel aus. Ich habe die Oberen nur wegen Kontaktsicherheit zur Platine reingebaut. Bei meinen anderen Koptern hab ich die Erfahrung gemacht, dass durch das erhöhte Anziehmoment der Stahlschrauben, die Steifigkeit merklich erhöht wird.
Ich habe ja nur nach Bildern nachgebaut. Aber soweit ich auf Wiliams Websight sehen kann, hat er auch keine Verzahnung. Ich hatte auch nie Kontakt mit William. Also lasse mich auch belehren wenn einer es besser weiß, bin über jeden Tip dankbar. Welche 1:1 Zeichnung meinst du?
Lange Rede, kurzer Sinn, es gibt eine Verzahnung. Ich kann Dir morgen ein Bild der Teile hier hochladen, bin grad nur nicht in PC Reichweite. Die Verzahnung erhöht die Klebefläche sehr. Da du die nicht hast, würde ich vielleicht mit Rovings an den Kanten von horizontal nach senkrecht verstärken. Nur zur Sicherheit ...
Edit: Bild geht doch ...
Anhänge
-
 44,9 KB Aufrufe: 17
44,9 KB Aufrufe: 17
Zuletzt bearbeitet:
Oh ja nun sehe ich das auf deiner Zeichnung auch deutlich. Ich werde mal überlegen ob ich da noch seitlich je eine art Bogen gegenklebe. Ich muss aber auch sagen, dass es jetzt schon mega Stabil ist. Hmm man kommt auch ins Grübeln, ob es beim Absturz nicht besser ist, das dieses Teil zuerst abfällt, bevor der Rest dahinter in Teile zerbricht.



Ich habe die Turnigy Plush 6a Regler mittels Arduino Board und BLHeli Software geflasht. Ja mir ist schon bewust das der 328 Prozessor, die nun vorhande Auflösung nicht nutzen kann. Das Mitbestellen einer Turnigy Programmierkarte hatte ich ganz vergessen und nun habe ich über das Flashen die Regler Einstellung vorgenommen.
Verkabelung ist komplett fertig. Akkus sind auch mit T-Steckern ausgerüstet worden. Im ersten Schritt hatte ich die Proppeler alle links laufend montiert, schon in der Hand merkte ich das starke Gieren. In der Config war die Drehrichtung anders abgebildet, mit gegenläufigen Propellern. Hiermit waren erste Schwebeversuche machbar.
Zuerst war starkes Zittern des Servos vorhanden, den Yaw Wert P wurde richtung 5 veringert. Besserung trat ein, perfekt ist aber bei weiten nicht. Zwischen Stable und Acro merkt man starken unterschied, die kannte ich nicht von anderen Koptern. Der Tri wiegt 290g inkl. Akku nun.
So stark wie erwartet sind die Robbe Motoren auch leider nicht. Schwebeflug ist bei 50 prozent Knüppelweg. Richtig angelernt und Maxtrottle auf 2000 gesetzt hab ich auch schon. Einzig das Timing der Motoren könnte evtl falsch sein.
Zuerst war starkes Zittern des Servos vorhanden, den Yaw Wert P wurde richtung 5 veringert. Besserung trat ein, perfekt ist aber bei weiten nicht. Zwischen Stable und Acro merkt man starken unterschied, die kannte ich nicht von anderen Koptern. Der Tri wiegt 290g inkl. Akku nun.
So stark wie erwartet sind die Robbe Motoren auch leider nicht. Schwebeflug ist bei 50 prozent Knüppelweg. Richtig angelernt und Maxtrottle auf 2000 gesetzt hab ich auch schon. Einzig das Timing der Motoren könnte evtl falsch sein.
Anhänge
-
 316,1 KB Aufrufe: 8
316,1 KB Aufrufe: 8 -
 322,6 KB Aufrufe: 7
322,6 KB Aufrufe: 7
Zuletzt bearbeitet:
Nach dem mir zu geringen Schubleistung der Motoren, hab ich alle Regler vom Schrumpfschlauch befreit und das Timing per BLHeli Programm auf High gesetzt. Die zweite Korektur war, dass der Mpu 6050 Sensor leicht schief verlötet war, jetzt ist er auf 3M tape gelagert und hat Kabel statt Stiftleiste. Ich erhoffe mir davon Vibrationen vom Sensor ferzuhalten.
Schubversuche haben nun auf der Waage in Bodennähe haben über ca 650 gramm Schub ergeben.
Die Motoren scheinen im oberen Drittel des Drezahlbandes so Richtig an Leistung zuzulegen Nach feintuning an den PId fliegt er gut und agil. Sehr wendig da man viel schneller mit dem heck schwenken kann.
Schubversuche haben nun auf der Waage in Bodennähe haben über ca 650 gramm Schub ergeben.
Die Motoren scheinen im oberen Drittel des Drezahlbandes so Richtig an Leistung zuzulegen
Nach feintuning an den PId fliegt er gut und agil. Sehr wendig da man viel schneller mit dem heck schwenken kann.
Zuletzt bearbeitet:

