
Ist schon länger geplant und Alle Teile bis auf die Aufhängung warten auf den Zusammenbau.
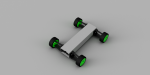
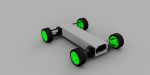
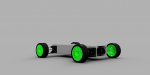
Verwendet werden 1100KV x-Motors von Flyduino. Das ist auch schon die Besonderheit, es gibt kein Getriebe
und Zahnräder etc, da mich das unendlich genervt hat. Die gehen immer kaputt... ausserdem ist es Energieverschwendung. Also 4 Motoren , jeder für ein Rad.Das ganze wird dann mit einem 4s Akku betrieben.
 Das Chassi ist übrigens ein Kabelschacht für 3€ / 2m ...... Also seeehr günstig ... die Esc's haben einen Rückwärtsgang einprogrammiert.
Das Chassi ist übrigens ein Kabelschacht für 3€ / 2m ...... Also seeehr günstig ... die Esc's haben einen Rückwärtsgang einprogrammiert.
Bin mal gespannt ob alles funktioniert, sollte so um die 100kmh schnell werden. Aber ich glaube die Reifen halten das ganze nicht aus.






Das Projekt ensteht mit einem Freund zusammen unter dem Namen Murdock
Wie immer gerne Anregungen Kritik und Fragen
Grüße Cyber-Trash
Verwendet werden 1100KV x-Motors von Flyduino. Das ist auch schon die Besonderheit, es gibt kein Getriebe
und Zahnräder etc, da mich das unendlich genervt hat. Die gehen immer kaputt... ausserdem ist es Energieverschwendung. Also 4 Motoren , jeder für ein Rad.Das ganze wird dann mit einem 4s Akku betrieben.
Das Chassi ist übrigens ein Kabelschacht für 3€ / 2m ...... Also seeehr günstig ... die Esc's haben einen Rückwärtsgang einprogrammiert. Bin mal gespannt ob alles funktioniert, sollte so um die 100kmh schnell werden. Aber ich glaube die Reifen halten das ganze nicht aus.
Das Projekt ensteht mit einem Freund zusammen unter dem Namen Murdock
Wie immer gerne Anregungen Kritik und Fragen
Grüße Cyber-Trash
Zuletzt bearbeitet:






