
Vorwort:
Hallo Leute,
ich habe mir einen Skywalker X5 Flying Wing V2 von Skywalker-Models gekauft und veröffentliche hier meinen Baubericht.
Mein Skywalker stammt von Hobbyking aus dem International-Warehouse. Seid kurzem ist dieser ja auch im DE-Warehouse verfügbar.
Es handelt sich hierbei um die Version 2 (V2), bei der die Winglets nicht senkrecht sondern schräg nach Außen angebracht sind.
Hier der Link von Hobbyking: Klick
Bauanleitung des Herstellers: >>>Download Bauanleitung<<<

[HR][/HR]
Hier findet Ihr mein verwendetes Setup:
Setup:
Motor: NTM Prop Drive Series 35-30A 1400 KV
Regler: Torcster Speedcontroler PRO SBEC 50A
Prop: Aeronaut Cam 8x6 / 9x6
Flug-Akku: 3s 4000 mAh 20c / später geplant 4s
FPV-Akku: 3s 1000 mAh 15c
Servo: Savox SH-0254 digital
FPV-Cam: GF-PX690 von Globeflight
OSD: Eagle Tree mit
-eLogger V4
- OSD Pro
- GPS V4
- Guardian
- Altimeter V4
Abfluggewicht 1300 Gramm.
[HR][/HR]Motor-Verbrauchs-Messung:
Ich habe ein handelsübliches Watt-Meter zwischen Akku und Regler gehängt und es ergaben sich mit dem "NTM Prop Drive Series 35-30A 1400 KV" folgende Werte im Standschub:
[TABLE="class: outer_border, width: 500, align: center"]
[TR]
[TD]Akku[/TD]
[TD]Prop[/TD]
[TD]Verbrauch[/TD]
[/TR]
[TR]
[TD]3s1p[/TD]
[TD]Aeronaut Cam Prop 9x6[/TD]
[TD]34 Amp Dauer[/TD]
[/TR]
[TR]
[TD]4s1P[/TD]
[TD]Aeronaut Cam Prop 9x6[/TD]
[TD]54 Amp Dauer[/TD]
[/TR]
[/TABLE]
weiter Tests folgen.....
[HR][/HR]
DXF-Datei für Bodenplatte zum kostenlosen herunterladen.
Für die von Euch, die selbst die Möglichkeit zum fräsen haben:
>>>Zum Download<<<
[HR][/HR]Der Baubericht:
Als erstes habe ich mir Gedanken gemacht, wie man den Rumpf verstärken kann, da ich im RCGroups-Forum ein paar Beiträge gelesen habe das die Tragflächen bei höherer Geschwindigkeit anfangen sich zu verbiegen. Dies ist auch kein Wunder, denn der Skywalker X5 hat keine Tragflächenversteifung in Form eines Rohres oder sonstiges.
Hierzu habe ich handelsübliche CFK-Rundstäbe benutzt und habe für diesen Durchmesser zwei Rohrschächte in die Unterseite der Tragflächen geschnitten. Dies geht relativ einfach mit einem Lineal und einem Teppichmesser.
Dazu die Aussenwände des Schachtes mit dem Lineal und dem Teppichmesser einritzen, anschließend mit einem Schraubenzieher oder ähnlichem das Material raus holen. Das gibt einen sauberen Schacht:




Im Rumpf habe ich noch eine zweite Verstärkung angebracht. Hierzu habe ich links und rechts zwei Löcher in die Seitenwand der Kabine gebohrt und zwei CFK-Rohre hinein geschoben. Da ein ganzes Rohr nicht benutzt werden kann (bekommt man nicht sauber rein) habe ich zwei Rohre benutzt die in der Mitte mit einem dritten Rohr (größerer Duchmesser) zusammen gehalten werden:

Im nächsten Schritt habe ich die Servos eingeklebt. Die Savöx SH-0254 digital sind ein paar wenige mm länger als der vorgesehene Schacht. Dieser lässt sich aber ohne Probleme mit einem Teppichmesser sauber verlängern. Ansonsten passt das Servo wie angegossen.

Nun hatte ich es mir zur Aufgabe gemacht den Boden der Kabine zu vermessen um hier einen GFK-Boden ein zu setzen. Dies erleichtert das Befestigen der RC-Komponenten enorm und macht auch noch einen sauberen Eindruck.
Dazu habe ich den Boden erstmal grob mit einer Schieblehre und einem kleinen Lineal vermessen. Anschließend das ganze in das CAD-Programm gehackt und eine grobe Schablone aus Holz gefräst. Da dies noch nicht passen konnte, habe ich eine 5mm kleine/große Skalierung auf die Schablone gemacht. Jetzt konnte ich beginnen genau zu vermessen und dies im CAD zu korrigieren.
Zwei weite Schablonen später war das Ergebnis nahezu perfekt:


Als dieser Schritt abgeschlossen war, habe ich noch die restlichen Teile, die dem Flieger als Sperrholzplatten beiliegen in das CAD-Programm übernommen und alles aus schwarzem GFK gefräst:

(Hinweis: Die DXF-Datei der Bodenplatte gibt es weiter oben zum Downloaden)
Jetzt waren die etwas nervigeren Arbeiten abgeschlossen und ich konnte meine Nerven am Ausschlachten des Rumpfes beruhigen
Überall wo meiner Meinung nach zu viel Styropor am Rumpf war, musste dies weg. Angefangen habe ich mit den Aussparungen für den FPV-Sender und das Eagle Tree GPS:


Die Antenne darf auch nicht fehlen

Die bereits vorhandene Aussparung für den Regler auf der Unterseite des Rumpfes fand ich persönlich etwas flach gewählt. Vielleicht wollte der Hersteller diese auch nur andeuten. Zumindest war mein Gedanke, dass jedes mal der Regler Bodenberührung hat wenn man den Flieger landet. Ob das auf Dauer gut ist?
Ich habe die Aussparung vertieft und eine GFK-Abdeckung über den Regler gesetzt. So sollte er ausreichend geschützt sein und genügend Luft zur Kühlung abbekommen:


Nun habe ich den Motorhalter samt Motor zusammengeschraubt. Dieser Halter besteht aus 3 GFK-Platten. Die hinterste wird am Rumpf verklebt, an der vordersten hängt der Motor. Als zusätzlichen Halt sind hinten 4 kurze CFK-Rohre verzapft die in den Rumpf führen und dort zusätzlich verklebt werden.
Den Motor wollte ich unbedingt mit Motorkreuz verschrauben so dass ich diesen bei Bedarf leicht wechseln kann. Diese Art der Befestigung hat sich schon beim großen Skywalker bewährt.
Hier das Ergebnis:






Hier noch ein Nachtrag zum Motoreinbau/Motorsturz:
Der Motorsturz ist ist laut Herstellerangaben falsch eingestellt wenn man den Motor einfach nur gerade an den Motorbürzel schrauben würde.
Dem Bausatz liegen normalerweise zwei kleine Balsa-Unterlegscheiben bei die an den oberen beiden Verschraubpunkten des Motorkreuzes untergelegt werden müssen um den Sturz richtig einzustellen.
Da diese Unterlegscheiben zum restlichen Motorträger passen sollte habe ich hier zwei Aluminium-Unterlegscheiben (Blau) untergelegt. Diese haben die selbe höhe wie die mitgelieferten Holz-Unterlegscheiben.
Beim ersten Anschrauben habe ich festgestellt das sich das Motorkreuz nicht richtig verschrauben lässt da sich die Schrauben mit dem Kreuz verkanten durch den schrägen Einbau.
Als Abhilfe habe ich die 4 Aussenlöcher etwas aufgebohrt, so geht es sauber drauf und lässt sich schön fest anliegend verschrauben:



Hier kann man erahnen wie der Sturz nun eingestellt ist:
Als Abschluss der Rohbau-Arbeiten am Rumpf der GFK-Boden-Ausbau-Satz. Dieser passt nun wie angegossen und es gibt viele Schlitze und Löcher wo die Komponenten schön sauber verstaut und befestig werden können.
Um dies auch möglich zu machen habe ich überall Schächte in den Styroboden des Fliegers gesetzt um die Kabelbinder und Klettverschlüsse unten durchführen zu können, denn der GFK-Boden wird mit Sekundenkleber eingeklebt:


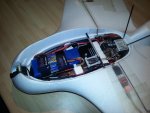
Nun der eigentlich aufwendigste Teil des ganzen wo auch die größte Sorgfalt an den Tag gelegt werden sollte.
Der Einbau der RC-Komponenten samt FPV:




Die FPV-Antenne braucht natürlich auch noch ihren Schutz. Rabe2000 (hier aus dem Forum) liefert hier immer die schönen Antennen-Schutz-Kappen mit:


Nun beginnen die Lackierarbeiten.
die Cockpit-Haube habe ich erst mit Safe-Coat eingepinselt und gerollert. Anschließend kann man mit normalen Autolacken (lösungsmittelfrei) lackieren.

Hier noch ein paar Bilder des zu 99,5 % fertigen Skywalker X5. Die Winglets müssen noch befestigt werden:







Und fertig ist er ;D




Flugberichte und Videos folgen auch so schnell wie möglich (falls er fliegt)
Viele Grüße
Michael
Erstflugbericht in Beitrag 2..........
Hallo Leute,
ich habe mir einen Skywalker X5 Flying Wing V2 von Skywalker-Models gekauft und veröffentliche hier meinen Baubericht.
Mein Skywalker stammt von Hobbyking aus dem International-Warehouse. Seid kurzem ist dieser ja auch im DE-Warehouse verfügbar.
Es handelt sich hierbei um die Version 2 (V2), bei der die Winglets nicht senkrecht sondern schräg nach Außen angebracht sind.
Hier der Link von Hobbyking: Klick
Bauanleitung des Herstellers: >>>Download Bauanleitung<<<
[HR][/HR]
Hier findet Ihr mein verwendetes Setup:
Setup:
Motor: NTM Prop Drive Series 35-30A 1400 KV
Regler: Torcster Speedcontroler PRO SBEC 50A
Prop: Aeronaut Cam 8x6 / 9x6
Flug-Akku: 3s 4000 mAh 20c / später geplant 4s
FPV-Akku: 3s 1000 mAh 15c
Servo: Savox SH-0254 digital
FPV-Cam: GF-PX690 von Globeflight
OSD: Eagle Tree mit
-eLogger V4
- OSD Pro
- GPS V4
- Guardian
- Altimeter V4
Abfluggewicht 1300 Gramm.
[HR][/HR]Motor-Verbrauchs-Messung:
Ich habe ein handelsübliches Watt-Meter zwischen Akku und Regler gehängt und es ergaben sich mit dem "NTM Prop Drive Series 35-30A 1400 KV" folgende Werte im Standschub:
[TABLE="class: outer_border, width: 500, align: center"]
[TR]
[TD]Akku[/TD]
[TD]Prop[/TD]
[TD]Verbrauch[/TD]
[/TR]
[TR]
[TD]3s1p[/TD]
[TD]Aeronaut Cam Prop 9x6[/TD]
[TD]34 Amp Dauer[/TD]
[/TR]
[TR]
[TD]4s1P[/TD]
[TD]Aeronaut Cam Prop 9x6[/TD]
[TD]54 Amp Dauer[/TD]
[/TR]
[/TABLE]
weiter Tests folgen.....
[HR][/HR]
DXF-Datei für Bodenplatte zum kostenlosen herunterladen.
Für die von Euch, die selbst die Möglichkeit zum fräsen haben:
>>>Zum Download<<<
[HR][/HR]Der Baubericht:
Als erstes habe ich mir Gedanken gemacht, wie man den Rumpf verstärken kann, da ich im RCGroups-Forum ein paar Beiträge gelesen habe das die Tragflächen bei höherer Geschwindigkeit anfangen sich zu verbiegen. Dies ist auch kein Wunder, denn der Skywalker X5 hat keine Tragflächenversteifung in Form eines Rohres oder sonstiges.
Hierzu habe ich handelsübliche CFK-Rundstäbe benutzt und habe für diesen Durchmesser zwei Rohrschächte in die Unterseite der Tragflächen geschnitten. Dies geht relativ einfach mit einem Lineal und einem Teppichmesser.
Dazu die Aussenwände des Schachtes mit dem Lineal und dem Teppichmesser einritzen, anschließend mit einem Schraubenzieher oder ähnlichem das Material raus holen. Das gibt einen sauberen Schacht:
Im Rumpf habe ich noch eine zweite Verstärkung angebracht. Hierzu habe ich links und rechts zwei Löcher in die Seitenwand der Kabine gebohrt und zwei CFK-Rohre hinein geschoben. Da ein ganzes Rohr nicht benutzt werden kann (bekommt man nicht sauber rein) habe ich zwei Rohre benutzt die in der Mitte mit einem dritten Rohr (größerer Duchmesser) zusammen gehalten werden:
Im nächsten Schritt habe ich die Servos eingeklebt. Die Savöx SH-0254 digital sind ein paar wenige mm länger als der vorgesehene Schacht. Dieser lässt sich aber ohne Probleme mit einem Teppichmesser sauber verlängern. Ansonsten passt das Servo wie angegossen.
Nun hatte ich es mir zur Aufgabe gemacht den Boden der Kabine zu vermessen um hier einen GFK-Boden ein zu setzen. Dies erleichtert das Befestigen der RC-Komponenten enorm und macht auch noch einen sauberen Eindruck.
Dazu habe ich den Boden erstmal grob mit einer Schieblehre und einem kleinen Lineal vermessen. Anschließend das ganze in das CAD-Programm gehackt und eine grobe Schablone aus Holz gefräst. Da dies noch nicht passen konnte, habe ich eine 5mm kleine/große Skalierung auf die Schablone gemacht. Jetzt konnte ich beginnen genau zu vermessen und dies im CAD zu korrigieren.
Zwei weite Schablonen später war das Ergebnis nahezu perfekt:
Als dieser Schritt abgeschlossen war, habe ich noch die restlichen Teile, die dem Flieger als Sperrholzplatten beiliegen in das CAD-Programm übernommen und alles aus schwarzem GFK gefräst:
(Hinweis: Die DXF-Datei der Bodenplatte gibt es weiter oben zum Downloaden)
Jetzt waren die etwas nervigeren Arbeiten abgeschlossen und ich konnte meine Nerven am Ausschlachten des Rumpfes beruhigen
Überall wo meiner Meinung nach zu viel Styropor am Rumpf war, musste dies weg. Angefangen habe ich mit den Aussparungen für den FPV-Sender und das Eagle Tree GPS:
Die Antenne darf auch nicht fehlen
Die bereits vorhandene Aussparung für den Regler auf der Unterseite des Rumpfes fand ich persönlich etwas flach gewählt. Vielleicht wollte der Hersteller diese auch nur andeuten. Zumindest war mein Gedanke, dass jedes mal der Regler Bodenberührung hat wenn man den Flieger landet. Ob das auf Dauer gut ist?
Ich habe die Aussparung vertieft und eine GFK-Abdeckung über den Regler gesetzt. So sollte er ausreichend geschützt sein und genügend Luft zur Kühlung abbekommen:
Nun habe ich den Motorhalter samt Motor zusammengeschraubt. Dieser Halter besteht aus 3 GFK-Platten. Die hinterste wird am Rumpf verklebt, an der vordersten hängt der Motor. Als zusätzlichen Halt sind hinten 4 kurze CFK-Rohre verzapft die in den Rumpf führen und dort zusätzlich verklebt werden.
Den Motor wollte ich unbedingt mit Motorkreuz verschrauben so dass ich diesen bei Bedarf leicht wechseln kann. Diese Art der Befestigung hat sich schon beim großen Skywalker bewährt.
Hier das Ergebnis:
Hier noch ein Nachtrag zum Motoreinbau/Motorsturz:
Der Motorsturz ist ist laut Herstellerangaben falsch eingestellt wenn man den Motor einfach nur gerade an den Motorbürzel schrauben würde.
Dem Bausatz liegen normalerweise zwei kleine Balsa-Unterlegscheiben bei die an den oberen beiden Verschraubpunkten des Motorkreuzes untergelegt werden müssen um den Sturz richtig einzustellen.
Da diese Unterlegscheiben zum restlichen Motorträger passen sollte habe ich hier zwei Aluminium-Unterlegscheiben (Blau) untergelegt. Diese haben die selbe höhe wie die mitgelieferten Holz-Unterlegscheiben.
Beim ersten Anschrauben habe ich festgestellt das sich das Motorkreuz nicht richtig verschrauben lässt da sich die Schrauben mit dem Kreuz verkanten durch den schrägen Einbau.
Als Abhilfe habe ich die 4 Aussenlöcher etwas aufgebohrt, so geht es sauber drauf und lässt sich schön fest anliegend verschrauben:
Hier kann man erahnen wie der Sturz nun eingestellt ist:
Als Abschluss der Rohbau-Arbeiten am Rumpf der GFK-Boden-Ausbau-Satz. Dieser passt nun wie angegossen und es gibt viele Schlitze und Löcher wo die Komponenten schön sauber verstaut und befestig werden können.
Um dies auch möglich zu machen habe ich überall Schächte in den Styroboden des Fliegers gesetzt um die Kabelbinder und Klettverschlüsse unten durchführen zu können, denn der GFK-Boden wird mit Sekundenkleber eingeklebt:
Nun der eigentlich aufwendigste Teil des ganzen wo auch die größte Sorgfalt an den Tag gelegt werden sollte.
Der Einbau der RC-Komponenten samt FPV:
Die FPV-Antenne braucht natürlich auch noch ihren Schutz. Rabe2000 (hier aus dem Forum) liefert hier immer die schönen Antennen-Schutz-Kappen mit:
Nun beginnen die Lackierarbeiten.
die Cockpit-Haube habe ich erst mit Safe-Coat eingepinselt und gerollert. Anschließend kann man mit normalen Autolacken (lösungsmittelfrei) lackieren.
Hier noch ein paar Bilder des zu 99,5 % fertigen Skywalker X5. Die Winglets müssen noch befestigt werden:
Und fertig ist er ;D
Flugberichte und Videos folgen auch so schnell wie möglich (falls er fliegt)
Viele Grüße
Michael
Erstflugbericht in Beitrag 2..........
Zuletzt bearbeitet:


