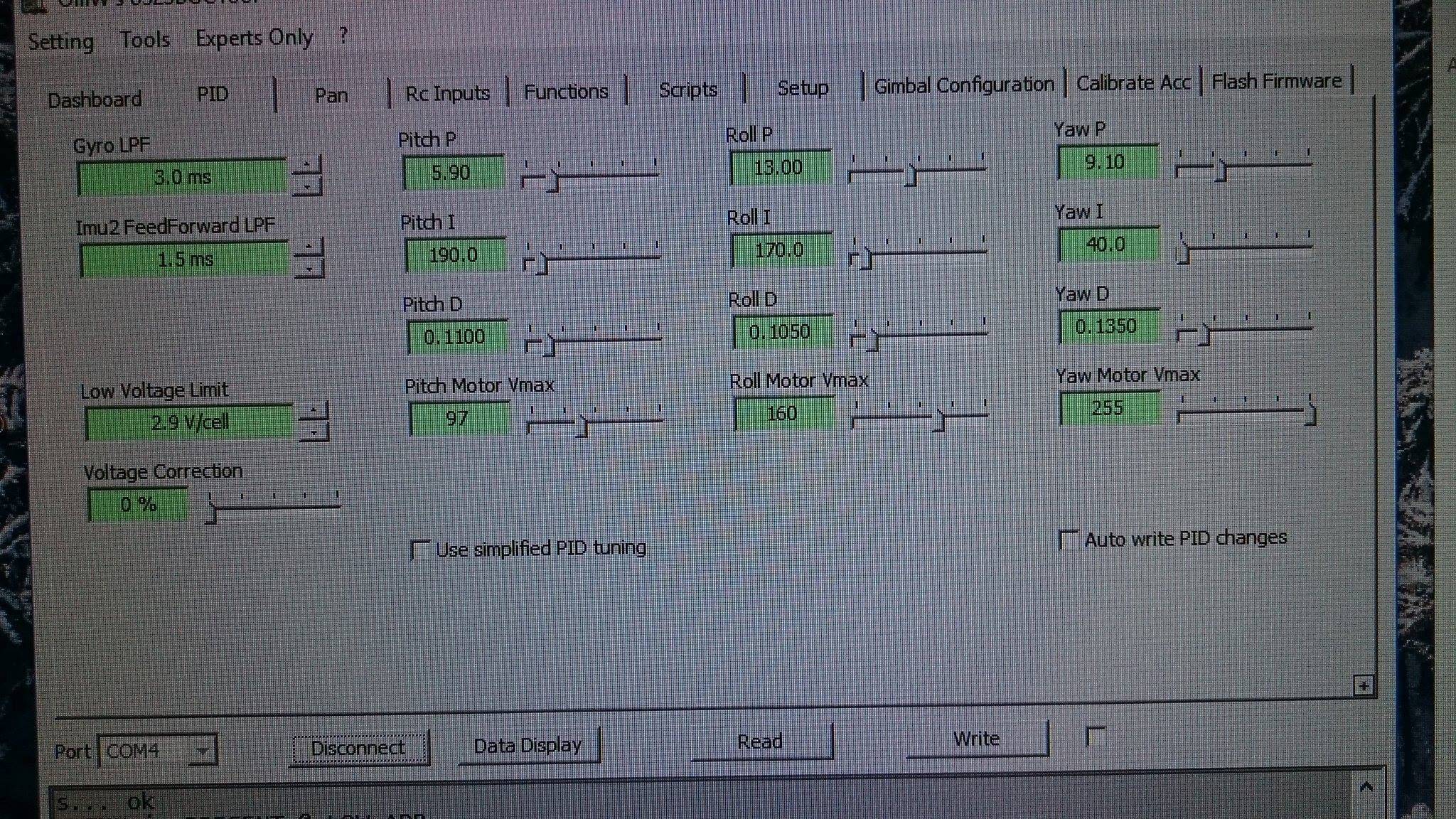
Schau mal im Reiter "PID". Dort ist es bei mir zu finden
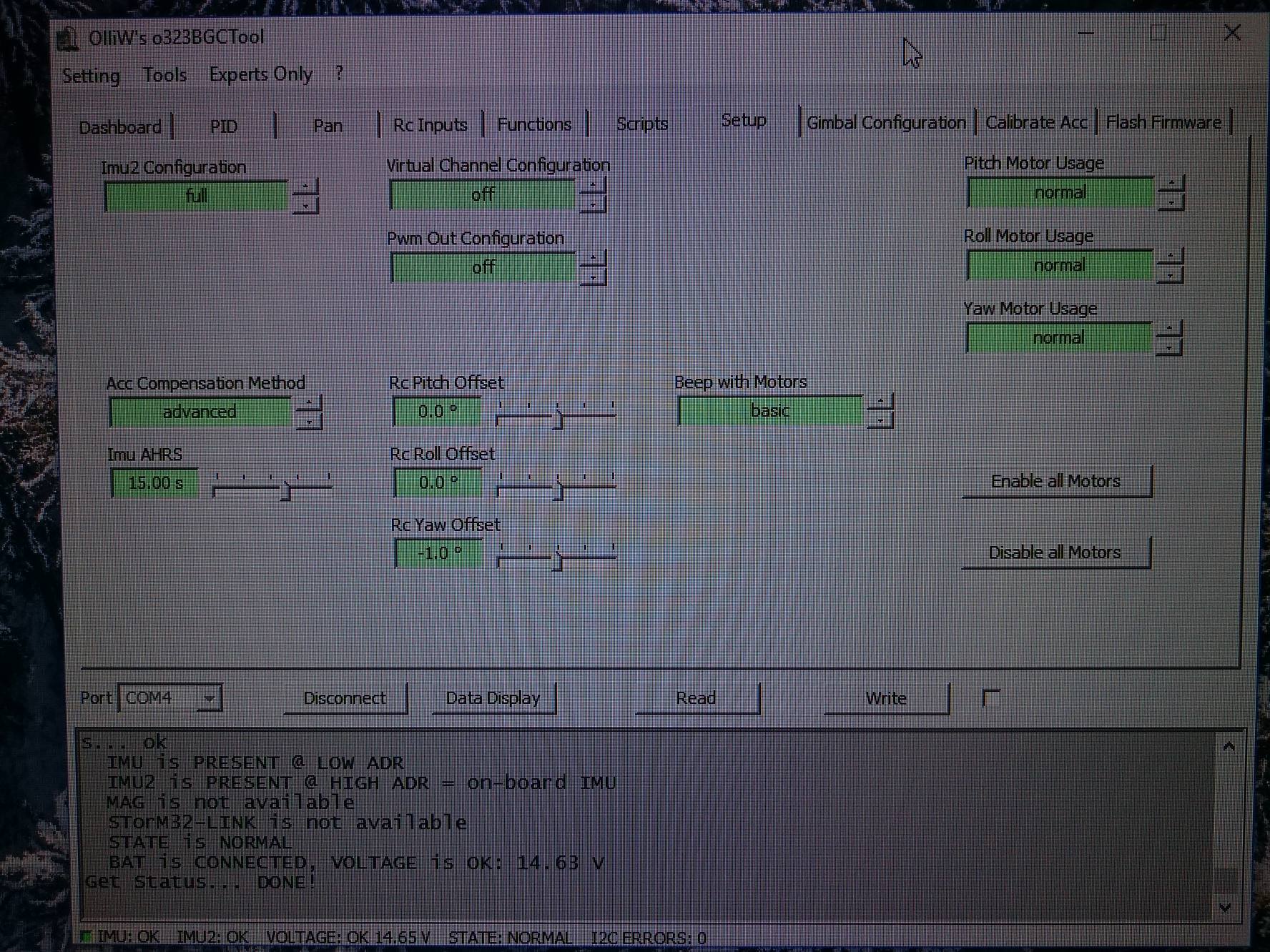
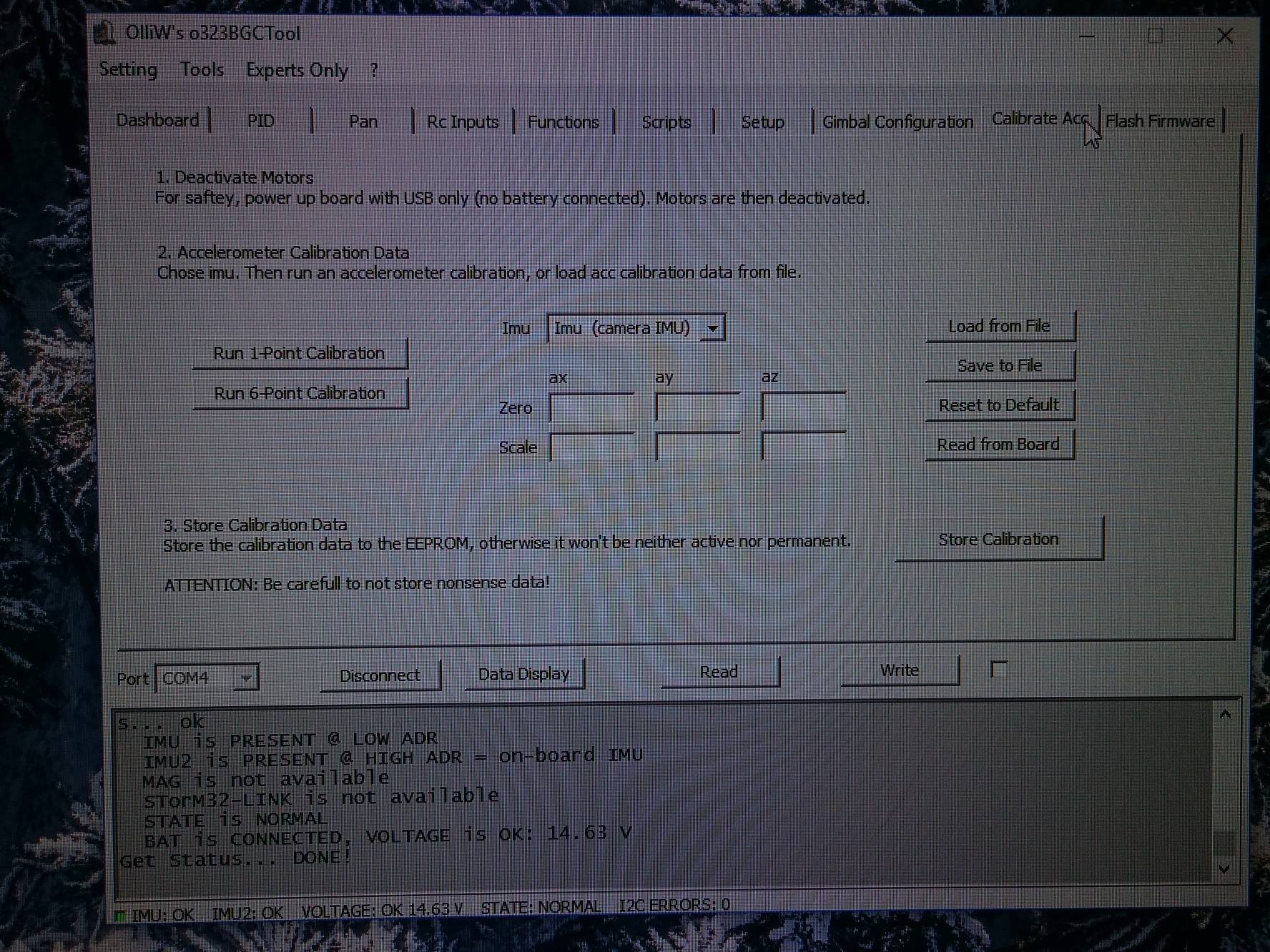
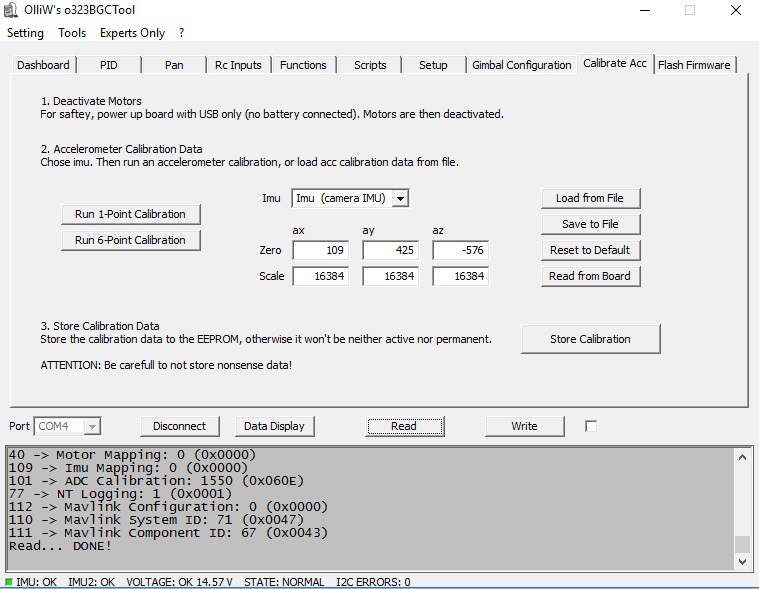
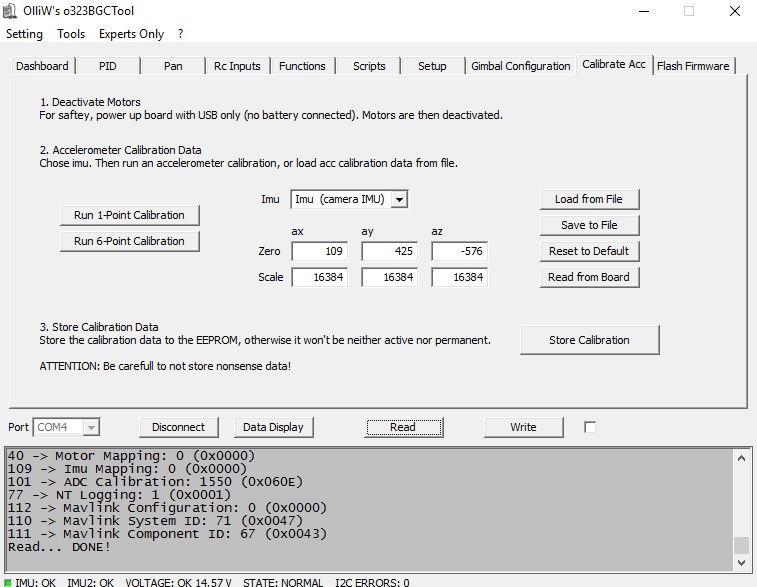
Was mich an deinem Bild aus Post #1620 stutzig macht ist, dass in dem mittelgrauem Fenster (Info Center) Spannung=11.01V ist und unten im dunkelgrauen Teil 15.02V.
Bei mir habe ich übrigens einen 12V Stepdown Regler für das Storm (an 4S) drin, nicht direkt über den Akku. So bekommt das Board auch bei sinkendem Akkustand immer die gleiche Spannung. Sonnst müsstest du theoretisch die PID´s anpassen.
Was mich an deinem Bild aus Post #1620 stutzig macht ist, dass in dem mittelgrauem Fenster (Info Center) Spannung=11.01V ist und unten im dunkelgrauen Teil 15.02V.
Bei mir habe ich übrigens einen 12V Stepdown Regler für das Storm (an 4S) drin, nicht direkt über den Akku. So bekommt das Board auch bei sinkendem Akkustand immer die gleiche Spannung. Sonnst müsstest du theoretisch die PID´s anpassen.
Zuletzt bearbeitet: