360mm FPV Spider Hex Aufbau (Grasshopper Hex)
Ein fröhliches Hallo,
Soeben meine Speicherkarte entleert und festgestellt, dass ich nun eigentlich genug Bilder für einen kleinen Baubericht zur Hand hätte... nicht all zu ausschweifend eine kleine Fotorstrecke der letzten Wochen. Das sind/waren meine ersten Berührungspunkte mit Multicoptern und der dahinter liegenden Technik. Sehr kurzweilig, gefällt mir und ich überlege schon was das nächste Projekt werden soll.
Komponenten:
Frame - Grashopper 300mm + extended Arms auf 360mm
ESC - Kiss ESC 12A
Motor - T-Motor MN1806 2300kv
Prop - HQProp 6x3 (verstärkt)
Flugsteuerung - Naze32 Full
PDB - Afroflight 36mm Board
UBEC - 5V 3A MiniUbec
Video Tx - ImmersionRC 5.8ghz
StepUp - ImmersionRC 5V->12V
Cam FPV - CMQ1993X (IRBlocked PZ0420)
Cam HD - Mobius V3 (Lens A)
RX - Frsky D4R-II
RGB Led - WS2812
Akku - 3s quer durch die Bank (2200-5000mAh)
Bauphase:
Rahmen:
- Foxtech Grasshopper 300 (+ extended Arms)

----------------------------------------------------------
Im ersten Schritt habe ich mich um das Kabel Layout gekümmert. Ziel war eine absolut sauberes Verkabelung ohne herum hängenden Leitungen. Also auf Länge gekürzt und verlötet (beim anmessen darauf achtend, dass für ev. Reparaturarbeiten ein kleiner Spielraum für das Zerlegen bleibt).

----------------------------------------------------------
Da ich die Grundverkabelung zwischen den beiden Bodenplatten geführt habe, war zunächst einmal eine längere Session mit dem Schleifpapier angesagt. Alle Kanten, die auch nur in die Nähe von Kabeln kommen, wurden "rund" und glatt geschliffen.

----------------------------------------------------------
ESCs wurden zwecks Kühlung auf die Arme montiert und nicht im Chassis integriert.

----------------------------------------------------------
Nun startete der heikle Teil, da ich den COG so nahe wie möglich am COT bauen wollte, war das Ziel alle Komponenten (Kameras mal ausgenommen) so gut es ging integriert im Heck auszuführen. Lötstellen wurden doppelt und dreifach kontrolliert.

----------------------------------------------------------
Alle Kabeln in schwarz heißt, viel Zeit mit dem Durchgangsprüfer verbringen. messen - beschriften - messen ... nochmals Kontrolle

----------------------------------------------------------
langsam nimmt alles Form an. Klarsicht-Schrumpfer, habe ich dann jedoch für eine bessere Kühlung der FETs geopfert.

----------------------------------------------------------
FC 90° gedreht ... RX PPM Leitung nach hinten geführt ... UBEC auf die Seite montiert (Step Up gegenüber). Spannungsversorgung und Steuerleitung für die RGB Leds (mit 2 Shottky Dioden in der 5V Leitung, da diese sonst zicken).

----------------------------------------------------------
Erste Versuche für die LED Steuerung und Basis PIDs.

----------------------------------------------------------
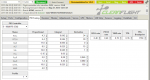
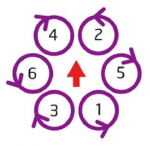
Cleanflight Custom Mix um Center of Thrust(COT) im Verhältnis zum FC zu bekommen ... hier hat User CA_Doug aus dem rcgroups.com Forum exzellente Arbeit geleistet und seine Werte (COT Parameter) funktionieren sehr gut.(QUELLE)

----------------------------------------------------------
Nach dem Einfliegen ging es an den Einbau der FPV Komponenten. Auf das MicroOSD habe ich letztenendes verzichtet. Unter dem Video Tx steckt der Frsky D4R.

----------------------------------------------------------
Zunächst wolle ich mein Glück mit der Mobius als FPV Kamera versuchen. Klappt allerdings nur bedingt. Bild ist brauchbar und Latenz ist akzeptabel, jedoch schon bei leichtem Gegenlicht befindet man sich im Blindflug.

----------------------------------------------------------
ursprünglichen Plan vollzogen und die CMQ1993X verbaut ... traumhaftes Bild im Vergleich zur Mobius und dabei war die schon ganz gut.

----------------------------------------------------------
Akkumontage unter dem Copter bringt den COG so weit es geht nach hinten. Vor dem Abflug lässt sich dieser relativ leicht überprüfen, indem man den Hexa auf den beiden mittleren Motoren balanciert, dort ist dann auch der COT.

----------------------------------------------------------
Vollbestückt ohne Akku liegt er bei etwa 684g. Je nach Setup ist dasein AUW von 850g mit 2200mAh/35C bis 1050g mit einem 5000mAh/25c. Den Kilogramm AUW beim dicken Akku empfinde ich auch als Grenzwert für den Abflug. Optimal zum "Bolzen" empfinde ich den Turnigy 3S 2400/65C HiVolt mit 200g.

----------------------------------------------------------
Fertig.

----------------------------------------------------------
Weitere Details

----------------------------------------------------------
Steher sind M3 Alu Chassis Bolzen eines T-REX550L und eignen sich perfekt.

----------------------------------------------------------

----------------------------------------------------------

mfg
puk
Ein fröhliches Hallo,
Soeben meine Speicherkarte entleert und festgestellt, dass ich nun eigentlich genug Bilder für einen kleinen Baubericht zur Hand hätte... nicht all zu ausschweifend eine kleine Fotorstrecke der letzten Wochen. Das sind/waren meine ersten Berührungspunkte mit Multicoptern und der dahinter liegenden Technik. Sehr kurzweilig, gefällt mir und ich überlege schon was das nächste Projekt werden soll.
Komponenten:
Frame - Grashopper 300mm + extended Arms auf 360mm
ESC - Kiss ESC 12A
Motor - T-Motor MN1806 2300kv
Prop - HQProp 6x3 (verstärkt)
Flugsteuerung - Naze32 Full
PDB - Afroflight 36mm Board
UBEC - 5V 3A MiniUbec
Video Tx - ImmersionRC 5.8ghz
StepUp - ImmersionRC 5V->12V
Cam FPV - CMQ1993X (IRBlocked PZ0420)
Cam HD - Mobius V3 (Lens A)
RX - Frsky D4R-II
RGB Led - WS2812
Akku - 3s quer durch die Bank (2200-5000mAh)
Bauphase:
Rahmen:
- Foxtech Grasshopper 300 (+ extended Arms)
----------------------------------------------------------
Im ersten Schritt habe ich mich um das Kabel Layout gekümmert. Ziel war eine absolut sauberes Verkabelung ohne herum hängenden Leitungen. Also auf Länge gekürzt und verlötet (beim anmessen darauf achtend, dass für ev. Reparaturarbeiten ein kleiner Spielraum für das Zerlegen bleibt).
----------------------------------------------------------
Da ich die Grundverkabelung zwischen den beiden Bodenplatten geführt habe, war zunächst einmal eine längere Session mit dem Schleifpapier angesagt. Alle Kanten, die auch nur in die Nähe von Kabeln kommen, wurden "rund" und glatt geschliffen.
----------------------------------------------------------
ESCs wurden zwecks Kühlung auf die Arme montiert und nicht im Chassis integriert.
----------------------------------------------------------
Nun startete der heikle Teil, da ich den COG so nahe wie möglich am COT bauen wollte, war das Ziel alle Komponenten (Kameras mal ausgenommen) so gut es ging integriert im Heck auszuführen. Lötstellen wurden doppelt und dreifach kontrolliert.
----------------------------------------------------------
Alle Kabeln in schwarz heißt, viel Zeit mit dem Durchgangsprüfer verbringen. messen - beschriften - messen ... nochmals Kontrolle
----------------------------------------------------------
langsam nimmt alles Form an. Klarsicht-Schrumpfer, habe ich dann jedoch für eine bessere Kühlung der FETs geopfert.
----------------------------------------------------------
FC 90° gedreht ... RX PPM Leitung nach hinten geführt ... UBEC auf die Seite montiert (Step Up gegenüber). Spannungsversorgung und Steuerleitung für die RGB Leds (mit 2 Shottky Dioden in der 5V Leitung, da diese sonst zicken).
----------------------------------------------------------
Erste Versuche für die LED Steuerung und Basis PIDs.
----------------------------------------------------------
Cleanflight Custom Mix um Center of Thrust(COT) im Verhältnis zum FC zu bekommen ... hier hat User CA_Doug aus dem rcgroups.com Forum exzellente Arbeit geleistet und seine Werte (COT Parameter) funktionieren sehr gut.(QUELLE)
----------------------------------------------------------
Nach dem Einfliegen ging es an den Einbau der FPV Komponenten. Auf das MicroOSD habe ich letztenendes verzichtet. Unter dem Video Tx steckt der Frsky D4R.
----------------------------------------------------------
Zunächst wolle ich mein Glück mit der Mobius als FPV Kamera versuchen. Klappt allerdings nur bedingt. Bild ist brauchbar und Latenz ist akzeptabel, jedoch schon bei leichtem Gegenlicht befindet man sich im Blindflug.
----------------------------------------------------------
ursprünglichen Plan vollzogen und die CMQ1993X verbaut ... traumhaftes Bild im Vergleich zur Mobius und dabei war die schon ganz gut.
----------------------------------------------------------
Akkumontage unter dem Copter bringt den COG so weit es geht nach hinten. Vor dem Abflug lässt sich dieser relativ leicht überprüfen, indem man den Hexa auf den beiden mittleren Motoren balanciert, dort ist dann auch der COT.
----------------------------------------------------------
Vollbestückt ohne Akku liegt er bei etwa 684g. Je nach Setup ist dasein AUW von 850g mit 2200mAh/35C bis 1050g mit einem 5000mAh/25c. Den Kilogramm AUW beim dicken Akku empfinde ich auch als Grenzwert für den Abflug. Optimal zum "Bolzen" empfinde ich den Turnigy 3S 2400/65C HiVolt mit 200g.
----------------------------------------------------------
Fertig.
----------------------------------------------------------
Weitere Details
----------------------------------------------------------
Steher sind M3 Alu Chassis Bolzen eines T-REX550L und eignen sich perfekt.
----------------------------------------------------------
----------------------------------------------------------
mfg
puk
Zuletzt bearbeitet:
")