
Elektronisch dynamisches Wuchten von Motor und Propeller (Arduino)
- Themenstarter rc-action_de
- Beginndatum
")
Also im Video nutzt der Typ nen Laserpointer und nen "normalen" Phototransistor. Man sieht das schön auf irgendeiner Webseite, da hat er den Laserpointer in so einer Halterung eingespannt ...
Er nutzt also keine Lichtschranke.
PS: habe das Foto gefunden
Er nutzt also keine Lichtschranke.
PS: habe das Foto gefunden
Anhänge
-
 149,7 KB Aufrufe: 76
149,7 KB Aufrufe: 76
Zuletzt bearbeitet:
Okay, tönt einleuchtend, bedingt aber auch, dass garantiert keine Runde "verloren" geht, sonst stimmt das Resultat natürlich nicht mehr.
Habe gerade mal angefangen das ganze Aufzubauen. Der CNY70 sollte locker reichen, 3-4cm sind noch gut zu unterscheiden (analog Wert von >100, ohne < 30), somit kann man den eig ganz gut an den Ausleger kleben (aber bitte so das er nicht wegfliegt, sonst sind die Kabel sicher futsch ^^).
Mal schauen, ich muss nun noch den ADXL verlöten, dann wäre ich bereit für ein ersten Test, habe dafür extra mein Hexa zerlegt (naja, extra ist übertrieben, kann ihn mit den Vibrationen eh nicht brauchen ^^).
Werde aber wohl frühstens am Freitag dazu kommen weiter zu machen.
Edit: Sind 220Ohm für den CNY wirklich okay auf der sender Seite? Also bei 5V
Habe gerade mal angefangen das ganze Aufzubauen. Der CNY70 sollte locker reichen, 3-4cm sind noch gut zu unterscheiden (analog Wert von >100, ohne < 30), somit kann man den eig ganz gut an den Ausleger kleben (aber bitte so das er nicht wegfliegt, sonst sind die Kabel sicher futsch ^^).
Mal schauen, ich muss nun noch den ADXL verlöten, dann wäre ich bereit für ein ersten Test, habe dafür extra mein Hexa zerlegt (naja, extra ist übertrieben, kann ihn mit den Vibrationen eh nicht brauchen ^^).
Werde aber wohl frühstens am Freitag dazu kommen weiter zu machen.
Edit: Sind 220Ohm für den CNY wirklich okay auf der sender Seite? Also bei 5V
Zuletzt bearbeitet:
Finde das Thema sehr interessant.
Mir fällt da gerade ein, dass die optischen Drehzahlmesser Fehler ergeben können, wenn bei Zimmerlicht und vor allem bei Neonröhren gemessen wird.
Mich würde abseits davon aber auch der Aufbau einer elektronische Messung NUR des Props interessieren. Ähnlich wie beim Autoreifen wuchten.
Motor und Prop gleichzeitig wuchten finde ich weniger gut. Wenn der Prop am Feld abreist und gewechselt wird stimmt nichts mehr.
Mir fällt da gerade ein, dass die optischen Drehzahlmesser Fehler ergeben können, wenn bei Zimmerlicht und vor allem bei Neonröhren gemessen wird.
Mich würde abseits davon aber auch der Aufbau einer elektronische Messung NUR des Props interessieren. Ähnlich wie beim Autoreifen wuchten.
Motor und Prop gleichzeitig wuchten finde ich weniger gut. Wenn der Prop am Feld abreist und gewechselt wird stimmt nichts mehr.
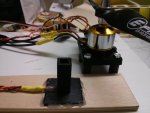
Habe die Schaltung mal nachgebaut. Die Lichtschranke besteht aus einem CNY70 und einem Infrarotlaserpointer. Ein grüner Laserponter sollte es auch tun. Die Motorhalterung ist 3D-gedruckt und an ihr ist ein ADXL345 festgeschraubt. Der Halter steht auf vier Schwingungsdämpfern. Am "Ausgang" des CNY70 sitzt ein kleiner Transistor der PIN2 des Arduino schaltet. Den CNY70 habe ich in einen 3D-gedruckten Tunnel gebaut um Lichteinflüsse aus der Umgebung zu minimieren.
Die Drehzahlerfassung funktioniert sehr zuverlässig und der Aufbau erzeugt einigermassen reproduzierbare Ergebnisse. Imho könnte die ganze Mimik etwas empfindlicher sein.
Die Drehzahlerfassung funktioniert sehr zuverlässig und der Aufbau erzeugt einigermassen reproduzierbare Ergebnisse. Imho könnte die ganze Mimik etwas empfindlicher sein.
Anhänge
-
 154,8 KB Aufrufe: 46
154,8 KB Aufrufe: 46 -
 142,7 KB Aufrufe: 42
142,7 KB Aufrufe: 42 -
 108,7 KB Aufrufe: 40
108,7 KB Aufrufe: 40
Ich krieg mein ADXL345 nicht zum laufen über SPI... An i2c läuft er wunderbar, aber auf SPI geht gar nichts.
Hat irgend jemand eine Idee? Ich hab den Sensor gebraucht gekauft, kann es ev. sein, dass da ein Register falsch gesetzt wurde und ich ihn nun nicht mehr auslesen kann? Kann man das ding irgend wie Reseten?
Hat irgend jemand eine Idee? Ich hab den Sensor gebraucht gekauft, kann es ev. sein, dass da ein Register falsch gesetzt wurde und ich ihn nun nicht mehr auslesen kann? Kann man das ding irgend wie Reseten?
Hallo zusammen,
sorry - ich habe lange nichts mehr von mir hören lassen ... es war einfach zu wenig Zeit für`s Hobby.
Da ich gerade meinen Y6 wieder regeneriere und wieder einmal vor dem Problem "wuchten" stehe, habe ich letztes WE noch einmal neu angefangen. Mit dem ADXL345 bekomme ich keine zufriedenstellenden Werte. Mit dem analogen ADXL335 allerdings schon - wobei er allerdings sehr unsensibel ist.
Ich habe es im Test folgendermaßen gelöst.
Die RuheWerte der X- Achse werden ermittelt und somit ein Offset ermittelt damit später ein Wert nahe 0 herauskommt. Nun wird mittels 0° Markierung am Motor auf die erste Umdrehung gewartet und alle ermittelten Werte in ein Array geschrieben. Nun wird das Array seriell an den Rechner übertragen und dort die Position der durchschnittlich höchsten und niedrigsten Werte ermittelt und in Form von Zeigern visualisiert.
Der Rote Zeiger zeigt die schwerere Stelle und der grüne die leichtere.
Durch die weiche Motoraufhängung kann es vorkommen das bei zunehmender Vibration die Unwucht versetzt dargestellt werden. Ich denke hier dürfte eine harte Aufhängung Abhilfe schaffen, wobei dann die Max- Ausschläge wieder kleiner werden dürften.
http://youtu.be/zdaQvEVwxL4
Viele Grüße
Henry
sorry - ich habe lange nichts mehr von mir hören lassen ... es war einfach zu wenig Zeit für`s Hobby.
Da ich gerade meinen Y6 wieder regeneriere und wieder einmal vor dem Problem "wuchten" stehe, habe ich letztes WE noch einmal neu angefangen. Mit dem ADXL345 bekomme ich keine zufriedenstellenden Werte. Mit dem analogen ADXL335 allerdings schon - wobei er allerdings sehr unsensibel ist.
Ich habe es im Test folgendermaßen gelöst.
Die RuheWerte der X- Achse werden ermittelt und somit ein Offset ermittelt damit später ein Wert nahe 0 herauskommt. Nun wird mittels 0° Markierung am Motor auf die erste Umdrehung gewartet und alle ermittelten Werte in ein Array geschrieben. Nun wird das Array seriell an den Rechner übertragen und dort die Position der durchschnittlich höchsten und niedrigsten Werte ermittelt und in Form von Zeigern visualisiert.
Der Rote Zeiger zeigt die schwerere Stelle und der grüne die leichtere.
Durch die weiche Motoraufhängung kann es vorkommen das bei zunehmender Vibration die Unwucht versetzt dargestellt werden. Ich denke hier dürfte eine harte Aufhängung Abhilfe schaffen, wobei dann die Max- Ausschläge wieder kleiner werden dürften.
http://youtu.be/zdaQvEVwxL4
Viele Grüße
Henry
Bzw. die Corioliskraft.
Es sollte sich auf jeden Fall ermitteln lassen indem man den Motor einmal versetzt drehen lässt und invertiert misst. Ein Mittelwert aus beiden Messungen sollte ein genaues Ergebnis zeigen. Das ist machbar aber etwas zu viel Aufwand vom Aufbau her.
Viele Grüße
Henry
Hallo zusammen,
hier mal eine Überlegung:
wenn man die Y- Achse zusätzlich zu X einblendet negiert und und deren Werte invertiert, dann erhält man mit steigender Drehzahl 2 auseinander driftende Störungen.
Deren Schnittpunkte sollten exakt das Übergewicht bzw. Untergewicht markieren - oder habe ich da einen Denkfehler.
Wenn man den Prescaler ändert, dann lassen sich viel mehr Werte auslesen. (fast schon zu viele)
#define cbi(sfr, bit) (_SFR_BYTE(sfr) &= ~_BV(bit))
#define sbi(sfr, bit) (_SFR_BYTE(sfr) |= _BV(bit))
sbi(ADCSRA,ADPS2) ;
cbi(ADCSRA,ADPS1) ;
cbi(ADCSRA,ADPS0) ;
Mein Array beinhaltet jeweils maximal 250 x und y Werte pro Umdrehung. Mit 690kV Motor und 12" Prop an 4S bekomme ich bei etwas mehr als Halbgas das Array gefüllt. Bei Vollgas und Prop sind es noch immer 120 Messwerte / Umdrehung.
Das einzige was stört ist das der ADXL 335 auch schon eine gewisse Unwucht benötigt um auch halbwegs große Ausschläge zu generieren. Zum Fein- wuchten ist der Sensor also nicht wirklich geeignet.
Hat jemand einen besseren Vorschlag für einen empfindlicheren Sensor ?
Viele Grüße
Henry
hier mal eine Überlegung:
wenn man die Y- Achse zusätzlich zu X einblendet negiert und und deren Werte invertiert, dann erhält man mit steigender Drehzahl 2 auseinander driftende Störungen.
Deren Schnittpunkte sollten exakt das Übergewicht bzw. Untergewicht markieren - oder habe ich da einen Denkfehler.
Wenn man den Prescaler ändert, dann lassen sich viel mehr Werte auslesen. (fast schon zu viele)
#define cbi(sfr, bit) (_SFR_BYTE(sfr) &= ~_BV(bit))
#define sbi(sfr, bit) (_SFR_BYTE(sfr) |= _BV(bit))
sbi(ADCSRA,ADPS2) ;
cbi(ADCSRA,ADPS1) ;
cbi(ADCSRA,ADPS0) ;
Mein Array beinhaltet jeweils maximal 250 x und y Werte pro Umdrehung. Mit 690kV Motor und 12" Prop an 4S bekomme ich bei etwas mehr als Halbgas das Array gefüllt. Bei Vollgas und Prop sind es noch immer 120 Messwerte / Umdrehung.
Das einzige was stört ist das der ADXL 335 auch schon eine gewisse Unwucht benötigt um auch halbwegs große Ausschläge zu generieren. Zum Fein- wuchten ist der Sensor also nicht wirklich geeignet.
Hat jemand einen besseren Vorschlag für einen empfindlicheren Sensor ?
Viele Grüße
Henry
Gefunden im Netz habe ich diese einfache Konstruktion für ein Auswuchtgerät für Turbinen und Impeller:
http://www.technik-tuefteler.de/motor/turbine/turbineauswuchten.htm
Da wird die Lage der Unwucht durch ein Oszilloskop ermittelt.
Mein Gedanke dazu ist nun folgender:
Mittels des Piezosensors die Stärke der Unwucht über ein LED Band anzeigen lassen.
Über eine weitere LED die Position des Signals anzeigen und zwar genau dann, wenn beide gemessenen "Peaks" genau zur selben Zeit gesendet werden, das heist das sich der Markierungssensor (Reflexlichtschranke) an der richtigen Stelle der Unwucht bzw. genau gegenüber befindet. In der Konstruktion ist der Sensor für die Wellenumdrehung ja beweglich an einem Arm und kann um die Welle herum bewegt werden. Sodass es doch gelingen müsste mit einem entsprechenden Programm auszulesen, wann die beiden Signale (höchste erzeugte Spannung (Sinuskurve) der Unwucht und der "Peak" durch die Lichtschranke zur gleichen Zeit erfolgen, wenn der Arm mit dem Sensor um die Welle bewegt wird.
Leider habe ich von der Programmierung eines Microprozessors null Ahnung, aber der Vorgang, der händisch mit dem Oszilloskop funktioniert, muß sich doch auch so, ohne Oszi darstellen lassen oder?
Verfeinern könnte man das ja noch das die Stärke der Unwucht auf dem LED-Band angezeigt würde je nach Spannung die der Piezosensor liefert. Dann kann man beim nächsten Lauf sehen ob das Ankleben eines Klebebandstückchens eine Besserung bringt. (Kürzere led-Kette)
Ich hoffe meine laienhaften Gedanken kann jemand verstehen....
http://www.technik-tuefteler.de/motor/turbine/turbineauswuchten.htm
Da wird die Lage der Unwucht durch ein Oszilloskop ermittelt.
Mein Gedanke dazu ist nun folgender:
Mittels des Piezosensors die Stärke der Unwucht über ein LED Band anzeigen lassen.
Über eine weitere LED die Position des Signals anzeigen und zwar genau dann, wenn beide gemessenen "Peaks" genau zur selben Zeit gesendet werden, das heist das sich der Markierungssensor (Reflexlichtschranke) an der richtigen Stelle der Unwucht bzw. genau gegenüber befindet. In der Konstruktion ist der Sensor für die Wellenumdrehung ja beweglich an einem Arm und kann um die Welle herum bewegt werden. Sodass es doch gelingen müsste mit einem entsprechenden Programm auszulesen, wann die beiden Signale (höchste erzeugte Spannung (Sinuskurve) der Unwucht und der "Peak" durch die Lichtschranke zur gleichen Zeit erfolgen, wenn der Arm mit dem Sensor um die Welle bewegt wird.
Leider habe ich von der Programmierung eines Microprozessors null Ahnung, aber der Vorgang, der händisch mit dem Oszilloskop funktioniert, muß sich doch auch so, ohne Oszi darstellen lassen oder?
Verfeinern könnte man das ja noch das die Stärke der Unwucht auf dem LED-Band angezeigt würde je nach Spannung die der Piezosensor liefert. Dann kann man beim nächsten Lauf sehen ob das Ankleben eines Klebebandstückchens eine Besserung bringt. (Kürzere led-Kette)
Ich hoffe meine laienhaften Gedanken kann jemand verstehen....
Zuletzt bearbeitet:

