
Nachdem wir mit dem GoFly Pocket vom Frickler so zufrieden waren, kam mir die Idee, den "Pocket" etwas erwachsener werden zu lassen. Und so entstand an einem Wochenende im CAD aus dem Pocket die UrsprungsVariante "GoFly Fun". Anzusiedeln zwischen GoFly Pocket und GoFly Travel.
Ziel war es die tollen Flugeigenschaften des Pocket auf eine etwas größere Plattform zu bringen und somit nicht nur kleine Flightcontroller zu unterstützen, sondern auch APM, NAZA, usw. Viele Ideen vom Fricker und mir flossen darin ein und das Ergebnis ist ein spritziger Klappcopter mit einer Motordiagonale von ca. 43cm. Die Ausleger sind aus 10mm Alu oder CFK.
Der erste Prototyp war noch mit einem alten Flip Board (rot) ausgestattet. Mit Roxxy 2824-34 an 9" Props mit 2s(!) kam ich auf knapp 18 Minuten Flugzeit mit einem 4000er Akku und noch ordenlticher Reserve.
Hier aber erstmal die Features:
Letztendlich entstanden mehrere Versionen, auf die ich in diesem Bericht auch teilweise querverweisen werde.
Dieser Bericht hier zeigt den Aufbau des GoFly Fun mit NAZA M V1 in folgender Konfiguration:
Später gibt es hier auch die DXF-Datei, sowie eine Modelldatei für die Taranis...
Konfiguration GoFly Fun NAZA:
[TABLE="width: 300"]
[TR]
[TD]FlightControl:[/TD]
[TD]DJI NAZA V1 mit GPS[/TD]
[/TR]
[TR]
[TD]Motoren:[/TD]
[TD]Keda 20-50S[/TD]
[/TR]
[TR]
[TD]Props:[/TD]
[TD]8x4.5 GemFan[/TD]
[/TR]
[TR]
[TD]ESC:[/TD]
[TD]Turnigy Plush 10A
(auf BLHeli geflasht)[/TD]
[/TR]
[TR]
[TD]Ausleger:[/TD]
[TD]10x10 CFK[/TD]
[/TR]
[TR]
[TD]Empfänger:[/TD]
[TD]FrSky DR4-II über SuSi[/TD]
[/TR]
[/TABLE]
Vorab die Grundidee und Vorgeschichte mit Prototypen:

den Pocket etwas vergrößern... (links Pocket, rechts die skalierte Version)


mit angeklappten Auslegern

probeweise mit APM 2.5 und GPS

Prototyp NAZA mit Deckplatte
So - ab hier nun START Baubericht")
Fräse angeworfen und aus 1.0mm GFK die Centerplates gefräst. Die Seitenteile und Motorträger sind aus 1.5mm GFK.

hier die Basis, frisch aus der Fräse gepurzelt. Man kann hier auch schon einige Änderungen gegenüber der Pocket Variante sehen, wie z.B. die Raster für die Ausleger (vom Lock-o-Copter des Fricklers übernommen), sowie Ösen zur Akkubefestigung (oben und unten). Desweiteren hinten ein kleiner "Bürzel" für die NAZA PMU mit LED nach unten.

Probesitzen NAZA

Die Seitenteile mit den Ösen für Klettband zur Akkubefestigung.

Zwischenstand Gewicht: 116,6 Gramm

Hier ein Keda 20-50S mit verlängerten Kabeln und bereits befestigten LEDs. Alle Kabel werden durch den Ausleger geführt.

noch unbearbeitete Motorhalter aus 1.5 GFK. Zusätzlich "Abstandsplätchen, damit die Motoren über die Centerplates beim Einklappen kommen.

Motor mit Halter und Abstandsplätchen befestigt.

der CFK-Ausleger ist innen rund. Dieses Material ist etwas stärker als die normalen Vierkant-CFK.

Die Arme mit Verkabelung schonmal fixiert

Position der Regler markiert um die Kabel entsprechend zu kürzen.

Die "alten" Kabel wurden vom Regler abgelötet und die neuen Kabel aus den Armen direkt am Regler verlötet

Hier sind gut die Markierungen für die spätere Positionierung zu sehen

Die NAZA PMU wird mit der LED nach unten montiert. So kann man sie im Flug auch besser erkennen

Die Kabel sind noch zu lang...

...und werden gekürzt.

Mit der Crimpzange werden neue Stecker aufgecrimpt...

... dann sieht's auch besser und aufgeräumter aus.

Aus 0,5er Platinenmaterial wurden zwei "Stromschienen" gefräst, da ein Verteilerboard nicht rein passt. So soll der Kabelwust ein wenig in Grenzen gehalten werden.

Die beiden Schienen ...

... werden an den Schrauben ausgerichet ...

... und mit Sekundenkleber aufgeklebt.

Wenn die Regler mit doppelseitigem Klebeband montiert sind, kann mit der Verkabelung begonnen werden.

von einem der hinteren Regler werden 5V für die spätere Verwendung nach außen gelegt.

Vorne findet der FrSky DR4-II seinen Platz.

die vorderen Regler und die Beleuchtung der Ausleger sind nun bereits mit den Stromschienen verlötet.

die NAZA PMU wird mit dppelseitigem Klebeband fixiert ...

... und verkabelt.
Update 27.04.2014

Ich werde das Summensignal verwenden und somit wird das Kabel zum Empfänger an X2 angeschlossen...

... und nach vorne zum Empfänger geführt. Beim FrSky D4R-II müssen hierzu Kanal 3 & 4 mit einem Jumper gebrückt werden. Somit weiß der Empfänger, dass er das Summensignal ausgeben soll.

von den Turnigy Reglern werden nur die Signalkabel genommen. Die Kabel habe ich gekürzt, gecrimpt und zu einem 4er Stecker zusammengefasst,...

...welcher am Naza angeschlossen (untere Reihe).

um Kamera und Videosender zu versorgen wird noch eine Steckverbindung nach außen vorbereitet.

Die Seitenteile werden eingeschoben...

... und die obere Centerplate kann montiert werden.

Klapptest...

... und Zwischenstand in Sachen Gewicht. Mit 370 Gramm eigentlich zufriedenstellend.
 an F2 vom Naza wird eine Steuerleitung für das Kameragimbal (Tiltausgleich) gelegt.
an F2 vom Naza wird eine Steuerleitung für das Kameragimbal (Tiltausgleich) gelegt.
Nun kann der Aufbau am Oberdeck beginnen
da ich gerne die Zellenspannung und die GPS Daten auf dem Sender habe, wird das FrSky GPS Modul verbaut und zusätzlich der Voltage-LiPo Sensor.

Das Kabel vom GPS-Modul wird gekürzt...

... und das GPS direkt auf dem FrSky Sensor-Hub mit doppelseitigem Klebeband fixiert.

Anschließend werden die Positionen für Sensorhub, GPS und LiPo Sensor ermittelt...

... und schnell eine Deckplatte mit Halter für Sensor und GPS-Mast gefräst.

Der Lipo-Sensor wird mit der Deckplatte...

... von hinten verschraubt

und zeigt dank des OLED-Displays auch die Akku-Informationen am Copter an.

Die Deckplatte bekommt einen klappbaren GPS-Masten und das Kabel wurde noch gekürzt. Einer der Prototypen hat das GPS direkt mit einem "Shield" in der Deckplatte eingelassen, daher hier mal die alternative Version mit Mast um zu sehen, wie der GPS Empfang besser ist.
FPV-Ausrüstung
Als Kamera kommt die beliebte Sony PZ0420 zum Einsatz.
Für diese habe ich ein passendes Gimbal gefräst, welches wechselbar ist und somit auch mal schnell gegen andere "Kamera-Gimbal-Module" ausgetauscht werden kann.

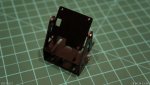
in die Kameraplatte werden 2mm Gewinde gebohrt...

... und die Kamera mit Spritschlauch gedämpft. (Hier auf dem Bild noch der Prototyp mit unbearbeiteten Kanten )
Update 06.05.2014
Die FPV Platinen-Kamera wurde montiert und bekam eine Frontblende und das Tilt-Servo

Das fertige Kamera-Modul
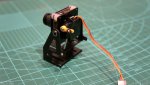
Das Tilt-Servo wird mit Spiegelklebeband an der Rückwand befestigt

Eine Deckplatte aus 0.5er GFK dient ein wenig der Kosmetik, damit die Platinenkamera verkleidet ist.
in Kürze geht es weiter...
Ziel war es die tollen Flugeigenschaften des Pocket auf eine etwas größere Plattform zu bringen und somit nicht nur kleine Flightcontroller zu unterstützen, sondern auch APM, NAZA, usw. Viele Ideen vom Fricker und mir flossen darin ein und das Ergebnis ist ein spritziger Klappcopter mit einer Motordiagonale von ca. 43cm. Die Ausleger sind aus 10mm Alu oder CFK.
Der erste Prototyp war noch mit einem alten Flip Board (rot) ausgestattet. Mit Roxxy 2824-34 an 9" Props mit 2s(!) kam ich auf knapp 18 Minuten Flugzeit mit einem 4000er Akku und noch ordenlticher Reserve.
Hier aber erstmal die Features:
- kleines Packmaß
- 2S oder 3S
- 10x10 Ausleger, klappbar
- bereit für gängige FlightControls
- leicht
- FPV-fähig
- kleines Kameragimbal für Platinencams
Letztendlich entstanden mehrere Versionen, auf die ich in diesem Bericht auch teilweise querverweisen werde.
Dieser Bericht hier zeigt den Aufbau des GoFly Fun mit NAZA M V1 in folgender Konfiguration:
Später gibt es hier auch die DXF-Datei, sowie eine Modelldatei für die Taranis...
Konfiguration GoFly Fun NAZA:
[TABLE="width: 300"]
[TR]
[TD]FlightControl:[/TD]
[TD]DJI NAZA V1 mit GPS[/TD]
[/TR]
[TR]
[TD]Motoren:[/TD]
[TD]Keda 20-50S[/TD]
[/TR]
[TR]
[TD]Props:[/TD]
[TD]8x4.5 GemFan[/TD]
[/TR]
[TR]
[TD]ESC:[/TD]
[TD]Turnigy Plush 10A
(auf BLHeli geflasht)[/TD]
[/TR]
[TR]
[TD]Ausleger:[/TD]
[TD]10x10 CFK[/TD]
[/TR]
[TR]
[TD]Empfänger:[/TD]
[TD]FrSky DR4-II über SuSi[/TD]
[/TR]
[/TABLE]
Vorab die Grundidee und Vorgeschichte mit Prototypen:
den Pocket etwas vergrößern... (links Pocket, rechts die skalierte Version)
mit angeklappten Auslegern
probeweise mit APM 2.5 und GPS
Prototyp NAZA mit Deckplatte
So - ab hier nun START Baubericht
Fräse angeworfen und aus 1.0mm GFK die Centerplates gefräst. Die Seitenteile und Motorträger sind aus 1.5mm GFK.
hier die Basis, frisch aus der Fräse gepurzelt. Man kann hier auch schon einige Änderungen gegenüber der Pocket Variante sehen, wie z.B. die Raster für die Ausleger (vom Lock-o-Copter des Fricklers übernommen), sowie Ösen zur Akkubefestigung (oben und unten). Desweiteren hinten ein kleiner "Bürzel" für die NAZA PMU mit LED nach unten.
Probesitzen NAZA
Die Seitenteile mit den Ösen für Klettband zur Akkubefestigung.
Zwischenstand Gewicht: 116,6 Gramm
Hier ein Keda 20-50S mit verlängerten Kabeln und bereits befestigten LEDs. Alle Kabel werden durch den Ausleger geführt.
noch unbearbeitete Motorhalter aus 1.5 GFK. Zusätzlich "Abstandsplätchen, damit die Motoren über die Centerplates beim Einklappen kommen.
Motor mit Halter und Abstandsplätchen befestigt.
der CFK-Ausleger ist innen rund. Dieses Material ist etwas stärker als die normalen Vierkant-CFK.
Die Arme mit Verkabelung schonmal fixiert
Position der Regler markiert um die Kabel entsprechend zu kürzen.
Die "alten" Kabel wurden vom Regler abgelötet und die neuen Kabel aus den Armen direkt am Regler verlötet
Hier sind gut die Markierungen für die spätere Positionierung zu sehen
Die NAZA PMU wird mit der LED nach unten montiert. So kann man sie im Flug auch besser erkennen
Die Kabel sind noch zu lang...
...und werden gekürzt.
Mit der Crimpzange werden neue Stecker aufgecrimpt...
... dann sieht's auch besser und aufgeräumter aus.
Aus 0,5er Platinenmaterial wurden zwei "Stromschienen" gefräst, da ein Verteilerboard nicht rein passt. So soll der Kabelwust ein wenig in Grenzen gehalten werden.
Die beiden Schienen ...
... werden an den Schrauben ausgerichet ...
... und mit Sekundenkleber aufgeklebt.
Wenn die Regler mit doppelseitigem Klebeband montiert sind, kann mit der Verkabelung begonnen werden.
von einem der hinteren Regler werden 5V für die spätere Verwendung nach außen gelegt.
Vorne findet der FrSky DR4-II seinen Platz.
die vorderen Regler und die Beleuchtung der Ausleger sind nun bereits mit den Stromschienen verlötet.
die NAZA PMU wird mit dppelseitigem Klebeband fixiert ...
... und verkabelt.
Update 27.04.2014
Ich werde das Summensignal verwenden und somit wird das Kabel zum Empfänger an X2 angeschlossen...
... und nach vorne zum Empfänger geführt. Beim FrSky D4R-II müssen hierzu Kanal 3 & 4 mit einem Jumper gebrückt werden. Somit weiß der Empfänger, dass er das Summensignal ausgeben soll.
von den Turnigy Reglern werden nur die Signalkabel genommen. Die Kabel habe ich gekürzt, gecrimpt und zu einem 4er Stecker zusammengefasst,...
...welcher am Naza angeschlossen (untere Reihe).
um Kamera und Videosender zu versorgen wird noch eine Steckverbindung nach außen vorbereitet.
Die Seitenteile werden eingeschoben...
... und die obere Centerplate kann montiert werden.
Klapptest...
... und Zwischenstand in Sachen Gewicht. Mit 370 Gramm eigentlich zufriedenstellend.
an F2 vom Naza wird eine Steuerleitung für das Kameragimbal (Tiltausgleich) gelegt.Nun kann der Aufbau am Oberdeck beginnen
da ich gerne die Zellenspannung und die GPS Daten auf dem Sender habe, wird das FrSky GPS Modul verbaut und zusätzlich der Voltage-LiPo Sensor.
Das Kabel vom GPS-Modul wird gekürzt...
... und das GPS direkt auf dem FrSky Sensor-Hub mit doppelseitigem Klebeband fixiert.
Anschließend werden die Positionen für Sensorhub, GPS und LiPo Sensor ermittelt...
... und schnell eine Deckplatte mit Halter für Sensor und GPS-Mast gefräst.
Der Lipo-Sensor wird mit der Deckplatte...
... von hinten verschraubt
und zeigt dank des OLED-Displays auch die Akku-Informationen am Copter an.
Die Deckplatte bekommt einen klappbaren GPS-Masten und das Kabel wurde noch gekürzt. Einer der Prototypen hat das GPS direkt mit einem "Shield" in der Deckplatte eingelassen, daher hier mal die alternative Version mit Mast um zu sehen, wie der GPS Empfang besser ist.
FPV-Ausrüstung
Als Kamera kommt die beliebte Sony PZ0420 zum Einsatz.
Für diese habe ich ein passendes Gimbal gefräst, welches wechselbar ist und somit auch mal schnell gegen andere "Kamera-Gimbal-Module" ausgetauscht werden kann.
in die Kameraplatte werden 2mm Gewinde gebohrt...
... und die Kamera mit Spritschlauch gedämpft. (Hier auf dem Bild noch der Prototyp mit unbearbeiteten Kanten
)Update 06.05.2014
Die FPV Platinen-Kamera wurde montiert und bekam eine Frontblende und das Tilt-Servo
Das fertige Kamera-Modul
Das Tilt-Servo wird mit Spiegelklebeband an der Rückwand befestigt
Eine Deckplatte aus 0.5er GFK dient ein wenig der Kosmetik, damit die Platinenkamera verkleidet ist.
in Kürze geht es weiter...
Zuletzt bearbeitet:



