
Warum "reloaded"? Ganz einfach - ich habe die Q30 schon sehr lange hier stehen, bin sie aber relativ wenig geflogen. Das lag zum einen an der Optik, weil damals alles schnell gehen musste und da war für Kosmetik keine Zeit. Alleine die ganzen Kabelbinder außen und die Regler... *schüttel* - überhaupt nicht "kaldistyle"...dann noch die Ausleger (von Hand gebohrt - super präzise  )
)
Desweiteren habe ich Probleme mit der Einstellung des "Gesamtpaketes" gehabt, von daher werden Motoren, Flightcontrol und OSD ausgetauscht.
Akuteller Status:


Das ist der Ausgangspunkt:
Hier mal ein paar Bilder "vor" dem Umbau:



Das wird geändert:
Der Rückbau:
zuerst wurde die Q30 wieder in Ihre Einzelteile zerlegt und alles entlötet.:







Der 4in1 Regler - Eigenbau:
da ich überhaupt kein Fan von Reglern mit Kabelbindern am Ausleger bin, habe ich mich entschlossen, die 4 Regler so platzsparend wie möglich zusammenzufassen. Dazu habe ich aus einem Kupferblech ein rechteckiges Stück ausgeschnitten und die kanten oben schräg ageschnitten, so dass die "Platine" genau zwischen die hinteren Ausleger unter die Flightcontrol passt. In die Mitte habe ich mit dem Dremel eine Rille gefräst, so habe ich einen Plus- und einen Minusbereich. Die Regler wurden dann mit Doppelseitigem Klebeband auf der Platine fixiert und die Kabel verlötet.
Hier wurden die Regler zur Probe mit Tesafilm zusammengeschnürt und probeweise zwischen die Centerplates gepackt...

schaut schon ganz gut aus...

schön flach...

Die gepackte Platine mit den Reglern (2 oben, 2 unten)


Die Unterseite...

an den hinteren Auslegern wurde vorne ein Stück weggeschnitten, so bekomme ich einen breiteren "Kabelkanal" nach vorne. Am vorderen Teil der Platine werden später die LEDs angelötet. Dann wird auch die Platine mit PlastiDip "versiegelt".

Beleuchtung an Eyefly Landefüßen:
schwarze Copter sind cool... aber verdammt schwer auf Sicht zu erkennen - von daher muss auch an die überarbeitete Q30 wieder LEDs dran. Damit diese sich harmonisch in das Gesamtbild integrieren, zeige ich Euch mal hier, wie ich das immer mache...
Zuerst wird ein Stück LED-Streifen abgeschnitten...

...welches durch die Bohrungen der Spiderfüße etwas zu lang ist...

...also kürzen wir ein Stück.

Die Kabel werden etwas schräg angelötet,...

...damit die Schraube noch dazwischen passt.

Und weil ich keine weißen LED-Streifen mag, werden sie an die Auslegerfarbe angepasst, indem ich sie lackiere. Damit die LEDs frei bleiben, wende ich folgenden Trick an:
Dazu brauche ich PlastiDip und einen Zahnstocher...

nun wird auf jede LED ein Tropfen PlastiDip gegeben,...

...und die Streifen auf ein Stück Pappe zum trocknen (ca 5 Minuten) geklebt.

Nach dem Lackieren...

...kann man mit dem Zahstocher ganz einfach das PlastiDip "wegschieben"...

...und zum Vorschein kommen saubere LEDs

Diese können wir nun von der Pappe befreien...

...und auf die Landefüße kleben.

Ein kurzer Funktionstest erfreut das Modellbauherz...

...gleiches für die hinteren Ausleger.

Nun werden noch die Triebwerke montiert...

...und die Kabel durch die Ausleger geführt.

Eine kurze Testmontage zeigt, dass alles passt. Hier auch nochmal schön der breitere Kabelkanal zu erkennen.

Update 13.03.2013
Hintere Motoren angeschlossen
Heute konnte ich nicht viel machen, dennoch hat das verlöten der hinteren Motorkabel mit dem 4in1 Regler 1,5 Stunden gekostet. Es ist wirklich "Fummelarbeit", die Kabel so kurz zu bekommen, zu verlöten und dann noch Schrumpfschlauch drüberzuziehen...



Update 14.03.2013
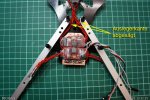
Vordere Motoren & Beleuchtung angeschlossen, Flightcontrol vorbereitet
Auch der Anschluß der vorderen Motoren hat ordentlich Zeit (2 Stunden) in Anspruch genommen. Die LEDs sind mit der 4in1 Platine verlötet und die FlightControl Naze32 schonmal probeweise montiert
LED-Kabel am 4in1 angelötet


Die vorderen Motoren sind nun auch mit dem 4in1 verbunden

Probesitz der oberen Centerplate und der FlightControl, sowie LED-Test
Vorne geht...

hinten geht auch...

So werden die Reglerkabel zur FlightControl geführt - hier noch provisorisch.
Ich überlege, ob ich die unteren Abstandshalter der Adapterplatine weglassen soll und so die FC noch etas niedriger bekomme. So wie sie jetzt montiert ist, wäre es für die Kühlung aber besser... sind ja auch nur 5mm

Und noch was zur allgemeinen Aufheiterung: such die Quadrixette...

Fortsetzung folgt...
)Desweiteren habe ich Probleme mit der Einstellung des "Gesamtpaketes" gehabt, von daher werden Motoren, Flightcontrol und OSD ausgetauscht.
Akuteller Status:
Das ist der Ausgangspunkt:
- Motoren: Strong 2208/17 1200 KV
- Regler: Turnigy Plush 10A
- FlightControl: zuletzt AQ50D, davor OpenPilot
- FPV-Sender: SkyRF 25mW
- FPV-OSD: EagleTree OSD Pro
- FPV-Kamera: GoPro 2 HD
Hier mal ein paar Bilder "vor" dem Umbau:
Das wird geändert:
- Ausleger neu und schwarz lackiert
- EyeFly Landefüße
- Verlegung aller Kabel in den Auslegern
- "Turmhöhe" deutlich reduziert
- Motoren: Roxxy 2824/26
- Regler: bleiben Turnigy Plush 10A -> aber Umbau zu 4in1
- FlightControl: Naze32 Funfly
- FPV-Sender: SkyRF 25mW
- FPV-OSD: E-OSD oder MFD Telefly Lite
- FPV-Kamera: GF 540 Orca, werden aber verschiedene getestet
Der Rückbau:
zuerst wurde die Q30 wieder in Ihre Einzelteile zerlegt und alles entlötet.:
Der 4in1 Regler - Eigenbau:
da ich überhaupt kein Fan von Reglern mit Kabelbindern am Ausleger bin, habe ich mich entschlossen, die 4 Regler so platzsparend wie möglich zusammenzufassen. Dazu habe ich aus einem Kupferblech ein rechteckiges Stück ausgeschnitten und die kanten oben schräg ageschnitten, so dass die "Platine" genau zwischen die hinteren Ausleger unter die Flightcontrol passt. In die Mitte habe ich mit dem Dremel eine Rille gefräst, so habe ich einen Plus- und einen Minusbereich. Die Regler wurden dann mit Doppelseitigem Klebeband auf der Platine fixiert und die Kabel verlötet.
Hier wurden die Regler zur Probe mit Tesafilm zusammengeschnürt und probeweise zwischen die Centerplates gepackt...
schaut schon ganz gut aus...
schön flach...
Die gepackte Platine mit den Reglern (2 oben, 2 unten)
Die Unterseite...
an den hinteren Auslegern wurde vorne ein Stück weggeschnitten, so bekomme ich einen breiteren "Kabelkanal" nach vorne. Am vorderen Teil der Platine werden später die LEDs angelötet. Dann wird auch die Platine mit PlastiDip "versiegelt".
Beleuchtung an Eyefly Landefüßen:
schwarze Copter sind cool... aber verdammt schwer auf Sicht zu erkennen - von daher muss auch an die überarbeitete Q30 wieder LEDs dran. Damit diese sich harmonisch in das Gesamtbild integrieren, zeige ich Euch mal hier, wie ich das immer mache...
Zuerst wird ein Stück LED-Streifen abgeschnitten...
...welches durch die Bohrungen der Spiderfüße etwas zu lang ist...
...also kürzen wir ein Stück.
Die Kabel werden etwas schräg angelötet,...
...damit die Schraube noch dazwischen passt.
Und weil ich keine weißen LED-Streifen mag, werden sie an die Auslegerfarbe angepasst, indem ich sie lackiere. Damit die LEDs frei bleiben, wende ich folgenden Trick an:
Dazu brauche ich PlastiDip und einen Zahnstocher...
nun wird auf jede LED ein Tropfen PlastiDip gegeben,...
...und die Streifen auf ein Stück Pappe zum trocknen (ca 5 Minuten) geklebt.
Nach dem Lackieren...
...kann man mit dem Zahstocher ganz einfach das PlastiDip "wegschieben"...
...und zum Vorschein kommen saubere LEDs
Diese können wir nun von der Pappe befreien...
...und auf die Landefüße kleben.
Ein kurzer Funktionstest erfreut das Modellbauherz...
...gleiches für die hinteren Ausleger.
Nun werden noch die Triebwerke montiert...
...und die Kabel durch die Ausleger geführt.
Eine kurze Testmontage zeigt, dass alles passt. Hier auch nochmal schön der breitere Kabelkanal zu erkennen.
Update 13.03.2013
Hintere Motoren angeschlossen
Heute konnte ich nicht viel machen, dennoch hat das verlöten der hinteren Motorkabel mit dem 4in1 Regler 1,5 Stunden gekostet. Es ist wirklich "Fummelarbeit", die Kabel so kurz zu bekommen, zu verlöten und dann noch Schrumpfschlauch drüberzuziehen...
Update 14.03.2013
Vordere Motoren & Beleuchtung angeschlossen, Flightcontrol vorbereitet
Auch der Anschluß der vorderen Motoren hat ordentlich Zeit (2 Stunden) in Anspruch genommen. Die LEDs sind mit der 4in1 Platine verlötet und die FlightControl Naze32 schonmal probeweise montiert
LED-Kabel am 4in1 angelötet
Die vorderen Motoren sind nun auch mit dem 4in1 verbunden
Probesitz der oberen Centerplate und der FlightControl, sowie LED-Test
Vorne geht...
hinten geht auch...
So werden die Reglerkabel zur FlightControl geführt - hier noch provisorisch.
Ich überlege, ob ich die unteren Abstandshalter der Adapterplatine weglassen soll und so die FC noch etas niedriger bekomme. So wie sie jetzt montiert ist, wäre es für die Kühlung aber besser... sind ja auch nur 5mm
Und noch was zur allgemeinen Aufheiterung: such die Quadrixette...
Fortsetzung folgt...
Zuletzt bearbeitet:

