Noch ein Twinstar (FY31AP)..ich glaube mein 6.er oder so mit Rümpfen zusammen ;-)
Die Twinstar II ist gefühlsmäßig wohl die meist verwendete, leicht zu bauende, einfach zu reparierende, und hervorragend zu fliegende und relativ günstigste Plattform für FPV.
Ich habe zumindest nicht um sonst bereits unzählige davon aufgebaut, oder Rümpfe bestellt um neue Ideen zu versuchen. Am Ende blieb der beste aber der aller erste, der nur noch mit Spucke und Spachtelmasse, bzw. Panzertape zusammen gehalten wurde ;-)
Hier soll nun mein definitiv letzter TS entstehen, der diesmal auf einem 4S-Setup beruht, statt wie sonst immer auf 3S. Allerdings ein LowBudget-Flieger.. Ich werde also mehr auf "NoName"-Produkte ausweichen, und "günstige" Servos und Motoren einsetzen.
Dahingehend kann ich die regulären Antriebe, die meist verbaut werden wie EMAX, Torcster, AHM und Co nicht mehr einsetzen, insbesondere, da ich größere Luftschrauben einsetzen möchte.
Hier werde ich auf Hobbyking F-20A Regler setzen und NTM 2830-750KV Motoren. Durch die niedrige KV-Zahl werde ich auch 9x5 von Graupner einsetzen. Auf einer "wilden" Flugwiese ist 8" eigentlich das Maximum was man ohne Fahrwerk usw. einsetzen sollte. Bodenstarts werden also nicht mehr möglich sein.
Als Servos nutze ich bisher bis auf zwei Ausnahmen am TS Hitec HS-82MG. Wenn das Geld knapp war HS-81, und Testweise sogar mal Torcster auf den Querrudern. Hier werde ich jedoch mal entgegen meines Bauchgefühls MG-Servos von HK einsetzen, die mal gerade 4,70$ kosten ( HK15148B Digital Servo 19g / 2.8kg / 0.14s )
Der TS wird von mir verstärkt. Es gibt sehr viele Tipps, wo und wie man den TS verstärken sollte, und ich habe sie soweit ich sagen kann alle durchprobiert, und finde 90% der Tipps mehr als unnötig.
Unnötig finde ich z.b
- Verstärkungen der Gondeln durch CFK-Profile oder Zahnstocher.
Reguläre Antriebe mit einem Verhältnis von bis zu 1,3:1 zumindest benötigen solch ein Verstärkung nicht. Bei Propellern in der Größenordnung entsteht kein solches Drehmoment, was ein gut eingebauter Motorhalter nicht abfangen kann.
- Verstärkungen bzw. Tapen der Flächen.
Sicher macht der TS bei schnellem und extremen Flug und Abfangen hier und da mal "lange Ohren".
Bis zum Flächenbruch oder Bruch der Arretierung liegen hier aber Welten. Das einfachste Mittel, um die Ohren Größtenteils bei diesen extremen Manövern zu verhindern bzw stark zu vermindern ist das Verkleben der Fläche als Ganzes. Dadurch ist sie zwar nicht mehr Teilbar, aber noch abnehmbar mittels der regulären 2 Schrauben. Diese Art ist nicht nur kostengünstiger, sondern auch leichter.
-Verstärkungen der Ruder.
Auch das ist unnötig. Ich werde zwar die Querruder bedingt verstärken, aber dies gilt mehr dem Schutz beim Transport, als dem Schutz der Ruder während dem Fliegen oder Landen.
- Sinnvoll hingegen ist der Schutz oder das Nachbessern in jedem Fall der Querruderscharniere. Diese sind bei 50% meiner Modelle nach wenigen Flügen bereits an der Außenseite angerissen gewesen. Jedoch werde ich hier abwarten bis es soweit ist, und das Scharnier dann gegen UHU-Por oä. Scharnier austauschen.
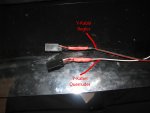
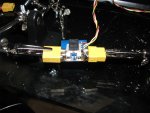
Also Autopilot kommt der FY31AP mit Hornet-OSD zu Einsatz. Als BEC werde ich ein 5/7,5A BEC von Tunrigy, ein 12V-BEC von Hobbwing und ein LC-Filter einsetzen.
Die Servos für Seite und Höhe werden von mir wie meistens nach hinten verlegt. Dadurch bliebt vorne mehr Platz für Akku, und ich kann vorne wesentlich mehr Gewicht aufnehmen.
Als Cam verwende ich in der Regel eine GoPro, die aber nicht auffindbar ist. Ich werde daher eine Seawulf 690TVL in der Gehäuseversion verwenden, und diese mit einer 1,8mm Linse ausstatten.
PAN/TILT verwende ich nicht, die Linse ist mir ausreichend um die Gegend zu genießen. Hier werde ich jedoch auch keine Kabinenhaube unnötig zerschneiden, sondern eine einfache,leichte und Platte einsetzen
Bei der Lackierung bin ich mir noch unschlüssig eigentlich sollte eine Raaben schwarze Lackierung mit weniger als wenig weißen Aktzenten kommen, aber ich habe nicht mal mehr 17ml schwarze Airbrushfarbe. Mal sehen was ich machen werde, und ob ich überhaupt was mache...
Und das wichtigste ist der Kofferraum am Ende. auch hier habe ich unzählige Rümpfe zersägt um alle möglich auszuprobieren. Meist habe ich aus Gewichtsgründen auf hohe Stabilitätsverluste dann verzichtet und getaped oder die Klappe wieder verklebt. Auch wenn ich die SD-Card nicht wirklich brauche, soll hier jedoch ein Dauerhafter Zugang zum Autopiloten und Hornet ermöglicht werden, ohne ständig Tape dabei haben zu müssen. Ich wird das Heck so stark wie möglich und nur so schwer wie nötig verstärkt. Leichte Holzleisten haben sich bewährt, jedoch werde ich auf CFK setzen.
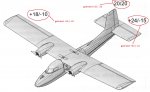
Die Einbauposition soll vorab schon mal wie folgt aussehen.

Die Vorbereitung bzw. die Vorlage zu diesem Bericht sieht schon mal so aus.

Baubericht Twinstar FPV
©Chucky1978")
©Chucky1978
Die Twinstar II ist gefühlsmäßig wohl die meist verwendete, leicht zu bauende, einfach zu reparierende, und hervorragend zu fliegende und relativ günstigste Plattform für FPV.
Ich habe zumindest nicht um sonst bereits unzählige davon aufgebaut, oder Rümpfe bestellt um neue Ideen zu versuchen. Am Ende blieb der beste aber der aller erste, der nur noch mit Spucke und Spachtelmasse, bzw. Panzertape zusammen gehalten wurde ;-)
Hier soll nun mein definitiv letzter TS entstehen, der diesmal auf einem 4S-Setup beruht, statt wie sonst immer auf 3S. Allerdings ein LowBudget-Flieger.. Ich werde also mehr auf "NoName"-Produkte ausweichen, und "günstige" Servos und Motoren einsetzen.
Dahingehend kann ich die regulären Antriebe, die meist verbaut werden wie EMAX, Torcster, AHM und Co nicht mehr einsetzen, insbesondere, da ich größere Luftschrauben einsetzen möchte.
Hier werde ich auf Hobbyking F-20A Regler setzen und NTM 2830-750KV Motoren. Durch die niedrige KV-Zahl werde ich auch 9x5 von Graupner einsetzen. Auf einer "wilden" Flugwiese ist 8" eigentlich das Maximum was man ohne Fahrwerk usw. einsetzen sollte. Bodenstarts werden also nicht mehr möglich sein.
Als Servos nutze ich bisher bis auf zwei Ausnahmen am TS Hitec HS-82MG. Wenn das Geld knapp war HS-81, und Testweise sogar mal Torcster auf den Querrudern. Hier werde ich jedoch mal entgegen meines Bauchgefühls MG-Servos von HK einsetzen, die mal gerade 4,70$ kosten ( HK15148B Digital Servo 19g / 2.8kg / 0.14s )
Der TS wird von mir verstärkt. Es gibt sehr viele Tipps, wo und wie man den TS verstärken sollte, und ich habe sie soweit ich sagen kann alle durchprobiert, und finde 90% der Tipps mehr als unnötig.
Unnötig finde ich z.b
- Verstärkungen der Gondeln durch CFK-Profile oder Zahnstocher.
Reguläre Antriebe mit einem Verhältnis von bis zu 1,3:1 zumindest benötigen solch ein Verstärkung nicht. Bei Propellern in der Größenordnung entsteht kein solches Drehmoment, was ein gut eingebauter Motorhalter nicht abfangen kann.
- Verstärkungen bzw. Tapen der Flächen.
Sicher macht der TS bei schnellem und extremen Flug und Abfangen hier und da mal "lange Ohren".
Bis zum Flächenbruch oder Bruch der Arretierung liegen hier aber Welten. Das einfachste Mittel, um die Ohren Größtenteils bei diesen extremen Manövern zu verhindern bzw stark zu vermindern ist das Verkleben der Fläche als Ganzes. Dadurch ist sie zwar nicht mehr Teilbar, aber noch abnehmbar mittels der regulären 2 Schrauben. Diese Art ist nicht nur kostengünstiger, sondern auch leichter.
-Verstärkungen der Ruder.
Auch das ist unnötig. Ich werde zwar die Querruder bedingt verstärken, aber dies gilt mehr dem Schutz beim Transport, als dem Schutz der Ruder während dem Fliegen oder Landen.
- Sinnvoll hingegen ist der Schutz oder das Nachbessern in jedem Fall der Querruderscharniere. Diese sind bei 50% meiner Modelle nach wenigen Flügen bereits an der Außenseite angerissen gewesen. Jedoch werde ich hier abwarten bis es soweit ist, und das Scharnier dann gegen UHU-Por oä. Scharnier austauschen.
Also Autopilot kommt der FY31AP mit Hornet-OSD zu Einsatz. Als BEC werde ich ein 5/7,5A BEC von Tunrigy, ein 12V-BEC von Hobbwing und ein LC-Filter einsetzen.
Die Servos für Seite und Höhe werden von mir wie meistens nach hinten verlegt. Dadurch bliebt vorne mehr Platz für Akku, und ich kann vorne wesentlich mehr Gewicht aufnehmen.
Als Cam verwende ich in der Regel eine GoPro, die aber nicht auffindbar ist. Ich werde daher eine Seawulf 690TVL in der Gehäuseversion verwenden, und diese mit einer 1,8mm Linse ausstatten.
PAN/TILT verwende ich nicht, die Linse ist mir ausreichend um die Gegend zu genießen. Hier werde ich jedoch auch keine Kabinenhaube unnötig zerschneiden, sondern eine einfache,leichte und Platte einsetzen
Bei der Lackierung bin ich mir noch unschlüssig eigentlich sollte eine Raaben schwarze Lackierung mit weniger als wenig weißen Aktzenten kommen, aber ich habe nicht mal mehr 17ml schwarze Airbrushfarbe. Mal sehen was ich machen werde, und ob ich überhaupt was mache...
Und das wichtigste ist der Kofferraum am Ende. auch hier habe ich unzählige Rümpfe zersägt um alle möglich auszuprobieren. Meist habe ich aus Gewichtsgründen auf hohe Stabilitätsverluste dann verzichtet und getaped oder die Klappe wieder verklebt. Auch wenn ich die SD-Card nicht wirklich brauche, soll hier jedoch ein Dauerhafter Zugang zum Autopiloten und Hornet ermöglicht werden, ohne ständig Tape dabei haben zu müssen. Ich wird das Heck so stark wie möglich und nur so schwer wie nötig verstärkt. Leichte Holzleisten haben sich bewährt, jedoch werde ich auf CFK setzen.
Die Einbauposition soll vorab schon mal wie folgt aussehen.
Die Vorbereitung bzw. die Vorlage zu diesem Bericht sieht schon mal so aus.
Zuletzt bearbeitet: