
OXSENS openXsensor mit HOTT Protokoll, erste Tests
- Themenstarter Carbonator
- Beginndatum
Guten Tag Zusammen,
ich habe folgendes Problem.
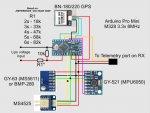
GR16, GPS U-Blox N8M, Arduino Mini Pro.. GPS vorsichtshalber auf Defaut gestellt mit 9600 usw. mit dem U-Blox Programm. GPS Tx an Arduino Rx, Rx GPS an Arduino Pin6 angeschlossen.
Mit dem Konfigurator openxsensor konfiguriert und die Daten in die IDE kopiert.
Arduino Mini Pro programmiert.
Wenn ich das System jetzt starte wird das GPS auf 38400 Baud umprogrammiert. Also richtig.
Nach einer Zeit ist das GPS auch syncron. PPS Signal am GPS ist dann auch da.
Jetzt müsste an Pin4 eine Telemetry rauskommen. GEHT nicht.
Was kann ich falsch gemacht haben ??????
Gruß Ulrich
ich habe folgendes Problem.
GR16, GPS U-Blox N8M, Arduino Mini Pro.. GPS vorsichtshalber auf Defaut gestellt mit 9600 usw. mit dem U-Blox Programm. GPS Tx an Arduino Rx, Rx GPS an Arduino Pin6 angeschlossen.
Mit dem Konfigurator openxsensor konfiguriert und die Daten in die IDE kopiert.
Arduino Mini Pro programmiert.
Wenn ich das System jetzt starte wird das GPS auf 38400 Baud umprogrammiert. Also richtig.
Nach einer Zeit ist das GPS auch syncron. PPS Signal am GPS ist dann auch da.
Jetzt müsste an Pin4 eine Telemetry rauskommen. GEHT nicht.
Was kann ich falsch gemacht haben ??????
Gruß Ulrich
Was kann ich falsch gemacht haben ??????
OpenXVario HOTT Support - openrcforums
Hallo,
leider kann ich mangels HOTT nichts testen, aber ich kann ein zip-File machen, das laufen sollte. Hast du außer dem GPS noch etwas angeschlossen?
Gruß Bernd
Edit: aktuelle Version gibt es hier (auf den grünen "Code"-Button, dann download zip):
GitHub - openXsensor/openXsensor: Arduino Telemetry for the RC world
leider kann ich mangels HOTT nichts testen, aber ich kann ein zip-File machen, das laufen sollte. Hast du außer dem GPS noch etwas angeschlossen?
Gruß Bernd
Edit: aktuelle Version gibt es hier (auf den grünen "Code"-Button, dann download zip):
GitHub - openXsensor/openXsensor: Arduino Telemetry for the RC world
Zuletzt bearbeitet:
Guten Morgen Zusammen,
jetzt habe ich neue Erkäntnisse.
Der Arduino sendet Daten nur dann wenn ein Empfänger dran ist. Denn der Empfänger , muss gebunden sein, sendet einen Impuls zum Adruino und bekommt dann eine Antwort vom Arduino . Wie hier schon erwähnt muss ein Pullup Widerstand am Arduino Pin4 sein, weil sonst der Arduino Pegel nur bis 1,5V hoch geht. Also Pullup nach Plus, dann eine Reihenschaltung Widerstand und Z-Diode nach Masse und am Mittelpunkt zum Empfänger.
Einen schönen Tag noch allen. Gruß Ulrich
jetzt habe ich neue Erkäntnisse.
Der Arduino sendet Daten nur dann wenn ein Empfänger dran ist. Denn der Empfänger , muss gebunden sein, sendet einen Impuls zum Adruino und bekommt dann eine Antwort vom Arduino . Wie hier schon erwähnt muss ein Pullup Widerstand am Arduino Pin4 sein, weil sonst der Arduino Pegel nur bis 1,5V hoch geht. Also Pullup nach Plus, dann eine Reihenschaltung Widerstand und Z-Diode nach Masse und am Mittelpunkt zum Empfänger.
Einen schönen Tag noch allen. Gruß Ulrich

Guten Tag Zusammen,
ich habe folgendes Problem.
GR16, GPS U-Blox N8M, Arduino Mini Pro.. GPS vorsichtshalber auf Defaut gestellt mit 9600 usw. mit dem U-Blox Programm. GPS Tx an Arduino Rx, Rx GPS an Arduino Pin6 angeschlossen.
Mit dem Konfigurator openxsensor konfiguriert und die Daten in die IDE kopiert.
Arduino Mini Pro programmiert.
Wenn ich das System jetzt starte wird das GPS auf 38400 Baud umprogrammiert. Also richtig.
Nach einer Zeit ist das GPS auch syncron. PPS Signal am GPS ist dann auch da.
Jetzt müsste an Pin4 eine Telemetry rauskommen. GEHT nicht.
Was kann ich falsch gemacht haben ??????
Gruß Ulrich
ich habe folgendes Problem.
GR16, GPS U-Blox N8M, Arduino Mini Pro.. GPS vorsichtshalber auf Defaut gestellt mit 9600 usw. mit dem U-Blox Programm. GPS Tx an Arduino Rx, Rx GPS an Arduino Pin6 angeschlossen.
Mit dem Konfigurator openxsensor konfiguriert und die Daten in die IDE kopiert.
Arduino Mini Pro programmiert.
Wenn ich das System jetzt starte wird das GPS auf 38400 Baud umprogrammiert. Also richtig.
Nach einer Zeit ist das GPS auch syncron. PPS Signal am GPS ist dann auch da.
Jetzt müsste an Pin4 eine Telemetry rauskommen. GEHT nicht.
Was kann ich falsch gemacht haben ??????
Gruß Ulrich
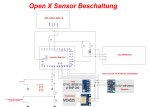
Habe mal die Beschaltung aufgemalt die geht. Sieht auf dem Ozi dann so aus.
Anhang anzeigen 192715 Anhang anzeigen 192716
Anhang anzeigen 192715 Anhang anzeigen 192716
Ohne Pullup Widerstand funktioniert es nicht. Ich habe 10k von Pin4 an VCC gelegt, dann meldet sich General Air Module im Sender MC16 korrekt. Empfänger ist GR12L.
Pullup Widerstände bei I2C habe ich bis jetzt noch nicht. Der BMP-180 hat wohl 10k auf dem board und der
MPU 6050 angeblich 4,7k.
Was noch Probleme bereitet ist wohl der MPU 6050. Hier hüpfen die Werte für Steigen wie wild zwischen + und - 0.3 m/s hin und her, auch wenn das Vario völlig ruhig daliegt.
Rauscht der Sensor? Hat jemand ähnliche Probleme?
Ich habe auch schon etwas mit der Sensitivity in den Einstellungen rumgespielt. Bin aber noch nicht ganz schlau draus geworden.
Hat jemand einen Tip für mich?

