
Ja, ich bastele weiter an VTOLs ")
Nachdem der letzte Versuch mit einem Tiltrotor Tri-Wing flog und gezeigt hat, dass die Arduplane Software mit Quadplane doch ziemlich gut taugt, habe ich mir überlegt wie ich das Konzept nicht mehr nur als PoC sondern "vernünftig" umsetze. Rausgekommen ist dabei die folgende Aufstellung:
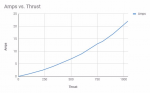
500g pro Motor sind bei ~7A erreicht, das ergibt 28A Schwebestrom. Nicht wenig, aber völlig OK für die kurzen Schwebephasen beim Start und im Landeanflug, gerade mit der größeren Akkukapazität die mitfliegt.
Vorwärtsflug sollte deutlich effizienter aussehen. Mein Skywalker 1680 flog mit dem Motor/Prop mit 5-6A mit lockeren 50 km/h, und war mit ~2,5kg nochmal ein Stück schwerer als der Mini Talon. Ich denke mit maximal 5A wird der gut vorwärts gehen, was dann doch ordentliche Flugzeiten mit sich bringt, sobald man nach dem Start die Transition gemacht hat und so tut als wäre man ein normales Flugzeug.
Baufortschritt
Alle Teile für den Flieger sind in der Werkstatt, und der Aufbau geht voran. Ich habe mir jede Menge 3D Druckteile in schwarzem PETG rausgehauen, sehr viele davon kamen von dieser genialen Seite: Parts Catalog - Mini Talon - ItsQv. Der Herr hat mit seinen 4 Mini Talons schon echt viel Erfahrung und jede Menge sehr nützlicher Teile veröffentlicht, was mir das Leben viel einfacher macht
Für den VTOL Teil musste ich jedoch selbst kreativ werden. Da der Talon wie oben geschrieben bereits vom Werk eine doppelte Flügelsteckung aus CFK besitzt, wollte ich das natürlich nutzen, um den Copterframe möglichst steif zu machen. Ich habe ein paar Teile gezeichnet, die in Ausschnitte im Flügel direkt an die CFK Steckungen sowie an den Schaum geklebt werden, und als Rohrklemmen für die VTOL Ausleger (14mm CFK Rohr) dienen:


Fertig zusammengesteckt sieht es dann in etwa so aus:


Motorhalter sind bereits gedruckt, und der VTOL Antrieb wird als nächstes fertig aufgebaut.
Servos und Anlenkungen zu Querrudern und beiden V-Tail Hälften sind bereits verbaut, und momentan baue ich am Innenleben des Fliegers. Der Holzrahmen ist in eine Rumpfhälfte eingeklebt, und die Elektronik wird gerade verkabelt und in den Rumpf verpflanzt.
Der finale Aufbau sollte sich im laufe der kommenden Woche erledigen, sodass am kommenden Wochenende oder irgendwann darauf der Erstflug passieren kann. Ich bin mal gespannt
Nachdem der letzte Versuch mit einem Tiltrotor Tri-Wing flog und gezeigt hat, dass die Arduplane Software mit Quadplane doch ziemlich gut taugt, habe ich mir überlegt wie ich das Konzept nicht mehr nur als PoC sondern "vernünftig" umsetze. Rausgekommen ist dabei die folgende Aufstellung:
- Basis: X-UAV Mini Talon. Der Flieger gefällt mir an sich sehr gut, und bietet folgende Vorteile für den VTOL Umbau:
- Die Flügel haben vom Werk eine doppelte CFK-Steckung, perfekt für einen steifen Quadplane-Frame.
- Die Flügel sind oben am Rumpf, damit sitzen die Quadplane-Motoren hoch genug für problemlose Starts und Landungen.
- V-Tail Konfiguration bietet hinten genug Platz für die hinteren Quadplane-Propeller.
- Der Rumpf bietet Unmengen an Platz für die Elektronik und einen größeren Akku.
- 1300mm Spannweite mit abnehmbaren Flügeln ist gerade an der Grenze wo es noch einfach transportierbar ist.
- VTOL Konfiguration: SLT aka. klassischer Quadplane mit separaten Motoren für Auf- und Vortrieb.
- Bei meinen bisherigen Tiltrotor-Experimenten hat sich die Schwenkmechanik als deutlicher Schwachpunkt erwiesen. Die gewünschte Effizienz hat sich auch nicht wirklich erreichen lassen: gute Propeller fürs Schweben sind leider weniger gut im schnellen Vorwärtsflug, und anders herum; starke Tilt-Servos und Mechanik machen den Gewichtsvorteil fast zunichte; und mehrere Vorwärtsflugmotoren sind weniger effizient als ein großer.
- Der neue Flieger wird deutlich einfacher ausgelegt, ohne Schwenkmechanik, mit relativ klein gehaltenem Quadcopter-Auftrieb und einem größeren Motor für den Vorwärtsflug.
- VTOL Antrieb: 4x AMAXinno 2305 1500kv mit HQ 7"x4" Propellern. Schön kompakt und leicht, dennoch erreicht jeder Motor knappe 1100g Schub auf 4S - damit sollte ein Schub-zu-Gewicht Verhältnis von 2:1 locker erreicht sein, was sicheren Schwebeflug ermöglicht.
- Vortrieb: SunnySky X3114 1100kv mit APC 9"x6". Übrig geblieben aus meinem verunglückten Skywalker 1680, der Motor ist grenzwertig groß für die Aufnahme im Mini Talon. Sollte dafür aber schön effizient vorwärts gehen. Kann evtl. im späteren Verlauf gegen einen kleineren getauscht werden.
- Flugsteuerung: Matek F405-Wing mit Arduplane Firmware. Seit Arduplane und Arducopter neulich viele F4 Boards aus der Betaflight-/INAV-Welt unterstützen, gibt es mmN keinen Grund mehr für den Pixhawk. Der F405-Wing vereint in einer kompakten Platine alles, was eine Pixhawk mit PowerModule, externem Servo-BEC und MinimOSD sonst auf mindestens 4 Bauteile mit massig Kabeln verteilt. Macht den Aufbau und die Verkabelung im Flieger deutlich einfacher und sauberer, und reduziert potenzielle Fehlerquellen.
- Dazu kommt ein BN-880 GPS/GNSS mit Kompass, und evtl. ein digitaler I2C Airspeed-Sensor.
- ESCs: BlueSeries 50A für den Vortrieb und AMAXinno 4-in-1 20A BlHeli_S für den Auftrieb. Der 4-in-1 wird im Rumpf unter der Flugsteuerung verbaut, und die Kabel zu den VTOL-Motoren via 6-Pin Multiplex Stecker in der Flügelsteckung rausgeführt.
- Servos: 4x Corona DS-929MG. Werden in vielen Bauberichten vom Mini Talon empfohlen, machen soweit einen guten Eindruck.
- FPV: Runcam Split auf Pan/Tilt, und ein TBS Unify HV Videosender. Vom F405-Wing wird ein OSD eingeblendet.
- Akkus: es kommen meine vertrauten Hacker 4S 5000 zum Einsatz. Potenziell kann der Flieger auch mehr mitnehmen, evtl lege ich mir ein paar Multistar 4S 6600er oder 8000er zu.
500g pro Motor sind bei ~7A erreicht, das ergibt 28A Schwebestrom. Nicht wenig, aber völlig OK für die kurzen Schwebephasen beim Start und im Landeanflug, gerade mit der größeren Akkukapazität die mitfliegt.
Vorwärtsflug sollte deutlich effizienter aussehen. Mein Skywalker 1680 flog mit dem Motor/Prop mit 5-6A mit lockeren 50 km/h, und war mit ~2,5kg nochmal ein Stück schwerer als der Mini Talon. Ich denke mit maximal 5A wird der gut vorwärts gehen, was dann doch ordentliche Flugzeiten mit sich bringt, sobald man nach dem Start die Transition gemacht hat und so tut als wäre man ein normales Flugzeug.
Baufortschritt
Alle Teile für den Flieger sind in der Werkstatt, und der Aufbau geht voran. Ich habe mir jede Menge 3D Druckteile in schwarzem PETG rausgehauen, sehr viele davon kamen von dieser genialen Seite: Parts Catalog - Mini Talon - ItsQv. Der Herr hat mit seinen 4 Mini Talons schon echt viel Erfahrung und jede Menge sehr nützlicher Teile veröffentlicht, was mir das Leben viel einfacher macht
Für den VTOL Teil musste ich jedoch selbst kreativ werden. Da der Talon wie oben geschrieben bereits vom Werk eine doppelte Flügelsteckung aus CFK besitzt, wollte ich das natürlich nutzen, um den Copterframe möglichst steif zu machen. Ich habe ein paar Teile gezeichnet, die in Ausschnitte im Flügel direkt an die CFK Steckungen sowie an den Schaum geklebt werden, und als Rohrklemmen für die VTOL Ausleger (14mm CFK Rohr) dienen:
Fertig zusammengesteckt sieht es dann in etwa so aus:
Motorhalter sind bereits gedruckt, und der VTOL Antrieb wird als nächstes fertig aufgebaut.
Servos und Anlenkungen zu Querrudern und beiden V-Tail Hälften sind bereits verbaut, und momentan baue ich am Innenleben des Fliegers. Der Holzrahmen ist in eine Rumpfhälfte eingeklebt, und die Elektronik wird gerade verkabelt und in den Rumpf verpflanzt.
Der finale Aufbau sollte sich im laufe der kommenden Woche erledigen, sodass am kommenden Wochenende oder irgendwann darauf der Erstflug passieren kann. Ich bin mal gespannt
Zuletzt bearbeitet:



















