
Hallo zusammen,
vor kurzem galt es meine Einkaufsliste abzusegnen und diesmal gibt es den Baubericht dazu") Aber zunächst einmal ein großes Dankeschön an alle die mich beraten hatten.
Aber zunächst einmal ein großes Dankeschön an alle die mich beraten hatten.
Vorweg:
Es handelt sich um einen Quadcopter mit selbstgefertigtem X-Frame. Ursprünglich sollte es ein H-Frame werden, aber als ich den Zirkel in der Hand hatte, wurde doch ein Quadrat aus dem Rechteck für die Baseplates...
Frame:
Da es sich um meinen ersten Eigenbau eines Multicopters handelt wollte ich viel experimentieren können aber nur wenig ausgeben:

Ich hatte mir die Maße alle schön ausgerechnet und sogar eine Vektorgrafik gebaut, um auch ja auf 35cm Spannweite für den Copter zu kommen...daher die Auslegerlänge von 17,5 cm. Aber 1. kam es dann anderst und 2. als ich dachte (Meine Propeller passen jedenfalls drauf) und ich bewege mich jetzt bei ca 40cm Spannweite.
Geplant ist es, FC/ESCs durch die obere Baseplate hindurch auf der Unteren zu mounten und quasi "zu versenken" und zu schützen. Wird sich zeigen in wie weit dieses vorhaben sinnvoll ist, da der Frame durch die weiter außen angebrachten Ausleger an Steifigkeit verliert. Zwei Platten aus 3mm Sperrholz sind aber doch recht massiv*g* sollte also gehen^^
Ausleger und Baseplates sind ziemlich ungenau und auf die schnelle ausgesägt, "nur zum ausprobieren" sagte ich mir und beiß mir jetzt kräftig in den Hintern. Die Bohrungen sind sowas von ungenau, es ist zum Haare raufen^^
Außerdem ist mir eingefallen, dass es nett wäre, wenn ich alle Kabel durch die Ausleger führen könnte. Dazu sind meine Aluausleger aber zu schmal...Da denk ich dann drüber nach, wenn ich mir ein paar passendere Baseplates baue...
Die Baseplates an sich sind auf den ersten Blick etwas groß geraten, war aber auch so geplant damit genügend Platz für meine chaotische Kabelführung vorhanden ist.
So, da heute meine Elektronik ankam, werd ich jetzt erstmal etwas Löten und die ESCs verkabeln.
Update dann vermutlich morgen
mfg
Edit1:
So, habe endlich mal Zeit gefunden ESCs und Motoren zu verlöten:

Im Nachhinein muss ich sagen, dass ich doch hätte Bullteconnecters verwenden sollen anstatt die Kabel zu verlöten.
Die Kabel vom Motor (DT700) sind meiner Meinung nach ziemlich crappy, ich bin schon gespannt ob da wirklich gute 15A drüber laufen ohne die Isolierung zu verschmoren... Bei den Kabeln von ESC zu Motor, handelt es sich um 16AWG bzw. um ein genormtes Äquivalent von 2.5mm² Querschnitt. Diese verlaufen auch zwischen ESC und Akku-Connector (noch nicht verlötet), dort dann aber zu einem strang zusammen.
Nachdem ich alles verlötet hatte, baute ich auch gleich das Frame zusammen sowie Motoren und ESCs in dieses hinein. Wie man unschwer erkennt, ist die Verkabelung noch ziemlich messy:
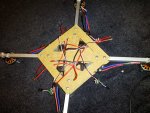
Um eine sauberer Verkabelung mach ich mir aber erst Sorgen, wenn der Rest zusammen passt und der Copter stabil in der Luft steht. Wie im ersten Post schon erwähnt, werde ich dann vermutlich auch gleich neue Baseplates aus- und etwas längere Ausleger zusägen.
Bisher bin ich mit dem momentanen Stand doch recht zufrieden. Zu verlöten ist noch der Akkustecker und dann ist es nur noch "plug 'n' fly".
vor kurzem galt es meine Einkaufsliste abzusegnen und diesmal gibt es den Baubericht dazu
Aber zunächst einmal ein großes Dankeschön an alle die mich beraten hatten.Vorweg:
Es handelt sich um einen Quadcopter mit selbstgefertigtem X-Frame. Ursprünglich sollte es ein H-Frame werden, aber als ich den Zirkel in der Hand hatte, wurde doch ein Quadrat aus dem Rechteck für die Baseplates...
Frame:
Da es sich um meinen ersten Eigenbau eines Multicopters handelt wollte ich viel experimentieren können aber nur wenig ausgeben:
- Baseplates aus 3mm Sperrholz (15cm², quadratisch)
- Ausleger aus Alu-4-Kant, 17,5cm (10mm im Durchmesser, 1mm stark)
- M 4x20mm Schrauben/Muttern.
Ich hatte mir die Maße alle schön ausgerechnet und sogar eine Vektorgrafik gebaut, um auch ja auf 35cm Spannweite für den Copter zu kommen...daher die Auslegerlänge von 17,5 cm. Aber 1. kam es dann anderst und 2. als ich dachte (Meine Propeller passen jedenfalls drauf) und ich bewege mich jetzt bei ca 40cm Spannweite.
Geplant ist es, FC/ESCs durch die obere Baseplate hindurch auf der Unteren zu mounten und quasi "zu versenken" und zu schützen. Wird sich zeigen in wie weit dieses vorhaben sinnvoll ist, da der Frame durch die weiter außen angebrachten Ausleger an Steifigkeit verliert. Zwei Platten aus 3mm Sperrholz sind aber doch recht massiv*g* sollte also gehen^^
Ausleger und Baseplates sind ziemlich ungenau und auf die schnelle ausgesägt, "nur zum ausprobieren" sagte ich mir und beiß mir jetzt kräftig in den Hintern. Die Bohrungen sind sowas von ungenau, es ist zum Haare raufen^^
Außerdem ist mir eingefallen, dass es nett wäre, wenn ich alle Kabel durch die Ausleger führen könnte. Dazu sind meine Aluausleger aber zu schmal...Da denk ich dann drüber nach, wenn ich mir ein paar passendere Baseplates baue...
Die Baseplates an sich sind auf den ersten Blick etwas groß geraten, war aber auch so geplant damit genügend Platz für meine chaotische Kabelführung vorhanden ist.
So, da heute meine Elektronik ankam, werd ich jetzt erstmal etwas Löten und die ESCs verkabeln.
Update dann vermutlich morgen
mfg
Edit1:
So, habe endlich mal Zeit gefunden ESCs und Motoren zu verlöten:
Im Nachhinein muss ich sagen, dass ich doch hätte Bullteconnecters verwenden sollen anstatt die Kabel zu verlöten.
Die Kabel vom Motor (DT700) sind meiner Meinung nach ziemlich crappy, ich bin schon gespannt ob da wirklich gute 15A drüber laufen ohne die Isolierung zu verschmoren... Bei den Kabeln von ESC zu Motor, handelt es sich um 16AWG bzw. um ein genormtes Äquivalent von 2.5mm² Querschnitt. Diese verlaufen auch zwischen ESC und Akku-Connector (noch nicht verlötet), dort dann aber zu einem strang zusammen.
Nachdem ich alles verlötet hatte, baute ich auch gleich das Frame zusammen sowie Motoren und ESCs in dieses hinein. Wie man unschwer erkennt, ist die Verkabelung noch ziemlich messy:
Um eine sauberer Verkabelung mach ich mir aber erst Sorgen, wenn der Rest zusammen passt und der Copter stabil in der Luft steht. Wie im ersten Post schon erwähnt, werde ich dann vermutlich auch gleich neue Baseplates aus- und etwas längere Ausleger zusägen.
Bisher bin ich mit dem momentanen Stand doch recht zufrieden. Zu verlöten ist noch der Akkustecker und dann ist es nur noch "plug 'n' fly".
Zuletzt bearbeitet:
 Anpassungen nach Forenregeln
Anpassungen nach Forenregeln
