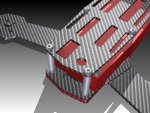
Das ist er – der RPR 220!
Inhaltsverzeichnis :
1. Vorgeschichte & Planung
2. Der Bau
3. Reserviert
4. Reserviert
Vorgeschichte :
Zusammen mit einem, ebenfalls copterverrückten, Kollegen kam uns die Idee einen Copter genau nach unseren Wünschen, mit unseren Verbesserungen und für unsere Bedürfnisse zu entwickeln und zu bauen.
Mein Kollege, PotRacer, fliegt aktuell einen QAV250 und ich einen ZMR250. Beide nicht schlecht, aber gewisse Schwachstellen zeigten sich immer wieder.
In umfangreichen Diskussionen stellten wir eine Liste zusammen was wir wollten.
Folgendes ist dabei herausgekommen :
- komplette Optimierung auf 5“ - kein mm zu viel
")
herausgekommen sind 220mm Diagonale. Klingt nicht viel weniger als die üblichen 250mm, aber in der Praxis machen 3cm viel aus, ihr werdet sehn
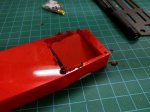
- sämtliche Elektronik soll in einer geschützten Box verschwinden.
Unglückliches Anfassen, Einschläge, Äste – alles schadet der Elektronik. Wir hoffen, dass durch die Box deutlich weniger Defekte entstehen. Außerdem kriegt der Copter dadurch eine einzigartige, cleane Optik.
- Leistungsklasse : 22er Motoren bis 4S 1800mAh
Bei 5“ sind Akkus größer als 4S 1800mAh nicht nötig. 18er Motoren liefern nicht das volle Leistungspotential.
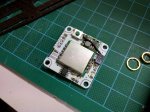
- Entkoppelte Camplate passend für die Xiaomi Yi
Bisherige lösten wir dies mit Schaumstoff und Klettband. Naja, es ging halbwegs, aber schön war es nicht
- Keine abstehenden Kabel
Akkukabel, FPV Antenne, alles sollte seinen festen Platz finden und nicht sollte herausstehen, denn alles was heraussteht bricht früher oder später ab.
Dabei ist dann der oben zu sehende RPR 220 herausgekommen. But wait – RPR, was bedeutet das?
Das ist 'ne witzige Geschichte
PotRacer warf irgendwann den den Begriff RuhrPottRacer ins Rennen.. Tja, das ist aber nicht die Bedeutung Voller Vorfreude witzelte ich : „Richtig pornöser Racer“ - ja und was soll ich sagen. Blöde Ideen sind die besten Ideen und daher blieb es dabei Ich denke die beiden Eingangsbilder sprechen schon für unsere Umsetzung all unserer Ideen. Das Design ist an den ZMR 250 / Blackout angelehnt. Die Arme sind allerdings kürzer, breiter und am Motor deutlich größer um 22er Motoren mehr Schutz und Stabilität zu bieten. Die drei Plates sind allerdings komplett neu designed. Die unterste Platte ist nahezu vollständig geschlossen. Das ist sicherlich fürs Gewicht nicht förderlich, aber kein Dreck, kein Ast hat eine Chance. Außerdem bietet es die Möglichkeit einige Bauteile ganz nach unten zu verlegen um Platz in der Höhe zu sparen. Die mittlere Plate ist hingegen gewichts- und funktionsoptimiert zugleich. Es sind viele Löcher vorhanden, aber alle haben eine Funktion. Außerdem wurden zwei Plätze für 36x36mm Platinen vorgesehen. Im Gegensatz zum üblichen Design werden FC und PDB nicht übereinander sondern hintereinander aufgebaut. Das ermöglicht eine leichte Montage und einen flachen Aufbau. In der Mitte ist sowohl Platz für eine normale FC, aber auch für einen Graupner GR-18, den ich verbauen werden.
Vor der FC ist noch ein Platz für einen Ortungspiepser vorgesehen, der sich zwischen Bot- und Midplate einklemmt und so nicht verloren gehen kann.
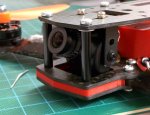
Zwischen Bot- und Midplate sind überall 3D Druck Teile vorgesehen. Wir nennen sie die „Dreck-weg-Spacer“.
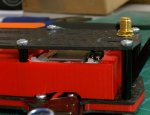
Die Topplate ist für einen 4S 1800mAh optimiert. Die Klettbänder sind genau darauf angepasst. Im hinteren Bereich ist zum einen einen SMA Connector vorgesehen und zum anderen eine Durchführung für einen XT60. So hängt das Kabel nicht außen herum, aber man kann trotzdem die Topplate abnehmen.
Alternativ ist noch ein SMA Anschluss hinter der Camplate vorgesehn – mal schauen welcher Platz sich besser anbieten wird.
Folgende Komponenten werden verbaut :
Motoren : Sunnysky X2204 2300KV CW
Regler : DYS SN20A (umgeflashed auf BLHeli 14.1)
Flightcontrol : Graupner GR-18 mit Copter Firmware
FPV Cam : HS1177
PDB : Matek PDB inkl. Lipo- und Ortungspiepser
Props : Gemfan 5045 oder Gemfan 5045 Bullnose
Zuletzt bearbeitet: