Hallo zusammen,
nachdem ich im vergangenen Jahr nur Kopter gebaut habe wollte ich einfach mal was anderes auf die Beine stellen. Was mir schon lange durch den Kopf ging war ein ferngesteuerter Rasenmäher. Beim Googlen findet man zwar einiges Anregendes doch so richtig gefallen hat mir keiner. Da ich noch einen arbeitslosen Rockcrawler rumstehen hatte war der Gedanke schnell geboren dem Crawler ein Mähwerk zu verpassen.
Was die Ausführung angeht ist der Crawler ideal für so ein Projekt. Geringe Geschwindigkeit, lange Fahrzeiten, große Reifen.
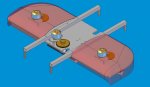
Also kurzer Hand das Fahrzeug weitestgehend demontiert, Maße genommen und nach und nach entstand folgende Konstruktion:
Kurzer Steckbrief zur Ausführung:
Mähwerk aus drei einzeln angetrieben Messerbalken. Durchmesser je 150mm
Mähbreite ca 450mm
Antrieb je Messerbalken BL Suppo 2813/1000kv mit 20A Regler und zwei parallele 2S/2200mAh Lipo
Übersetzung Mähwerk 1:4 bis 1:5
Schnitthöhe Rasen 4 bis 5 cm
Und da soll das ganze rein:

Zum Fahrzeug selber gibt es vieles im Internet deshalb möchte ich da nicht ins Detail gehen. Für den Verwendungszweck als Rasenmäher ist die Federung und Achsverwindung allerdings nicht geeignet – es sei denn jemand wünscht sich einen Wellenschnitt im Rasen. Somit wurden die Antriebsachsen durch zwei Längsträger starr verbunden. Der Achsabstand auf 340mm vergrößert.

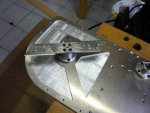
An die Längsträger wird die Grundplatte des Mähwerks befestigt. Damit das Ganze nicht zu starr wird finden hier sogenannte D-Locks Verwendung. Hier mal der Grundaufbau mit Antrieb und einem Messerbalken.


Mähwerk:
Als Schneide verwende ich die einfachen Trapezklingen aus einem Teppichbodenmesser. Sofern keine Steine oder andere Fremdkörper im Rasen liegen müsste das funktionieren. Auf alle Fälle gibt es einen besseren Schnitt als mit dem klassischen Mähmesser.
Der Lagerflansch hat zwei Kugellager und eine zentrale Bohrung zum Abschmieren.

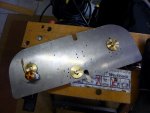
Fertig sieht das Ganze dann so aus. Auf der Karosserie hab ich noch aus alten Tagen die Halterung für die FPV-Kamera.

Das ist im Moment der aktuelle Stand. Da die wesentlichen Teile schon alle fertig sind und „nur“ noch Anpassungen und Montage erfolgen hoffe ich mal, dass es zügig vorangeht bis der erste Grashalm fällt.
Jetzt bin ich mal auf Eure Meinungen gespannt…
Grüße
Knut
So, weiter gehts....
am Wochenende hab ich alle noch ausstehende Teile gefertigt und mit der Montage begonnen. Was im Moment unheimlich aufhält ist das Anpassen der Schrauben. Leider hab ich nicht sonderlich auf Normlängen und eigener Schraubenbestand geachtet. Jetzt muss ich fast alle Schrauben abnehmen.
Dennoch nimmt das Mähwerk langsam Gestalt an...
Weiter unten hab ich meine ersten Mähversuche dokumentiert...
So, nun die finale Endmontage
Das Mähwerk montiert und an das Chassis geschraubt

Die Regler der Mähwerksmotoren

Die Halterung für Karosserie und Elektronik

Das Ganze dann zusammen montiert

von vorne... beim mittleren Motor geht es ziemlich eng zu

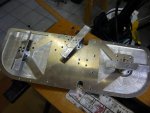
von unten

und so siehts im Moment aus

soweit funktioniert alles. Neben den Fahrfunktionen läßt sich das Mähwerk stufenlos in der Drehzahl steuern.
Morgen werd ich mich noch den Getrieben widmen - wie zu erwarten war machen die Messing / Stahl Stirnräder mächtig Krach. Vielleicht hat ja jemand einen Tip wie man das halbwegs leise bekommt - mir fällt im Moment nur Fett ein.
Als nächstes werden die Mähmesser noch aufgebort und dann montiert. Sollte das Wetter morgen gut sein gibt es den ersten Mähversuch und natürlich Bilder und ggf einen Video.
nachdem ich im vergangenen Jahr nur Kopter gebaut habe wollte ich einfach mal was anderes auf die Beine stellen. Was mir schon lange durch den Kopf ging war ein ferngesteuerter Rasenmäher. Beim Googlen findet man zwar einiges Anregendes doch so richtig gefallen hat mir keiner. Da ich noch einen arbeitslosen Rockcrawler rumstehen hatte war der Gedanke schnell geboren dem Crawler ein Mähwerk zu verpassen.
Was die Ausführung angeht ist der Crawler ideal für so ein Projekt. Geringe Geschwindigkeit, lange Fahrzeiten, große Reifen.
Also kurzer Hand das Fahrzeug weitestgehend demontiert, Maße genommen und nach und nach entstand folgende Konstruktion:
Kurzer Steckbrief zur Ausführung:
Mähwerk aus drei einzeln angetrieben Messerbalken. Durchmesser je 150mm
Mähbreite ca 450mm
Antrieb je Messerbalken BL Suppo 2813/1000kv mit 20A Regler und zwei parallele 2S/2200mAh Lipo
Übersetzung Mähwerk 1:4 bis 1:5
Schnitthöhe Rasen 4 bis 5 cm
Und da soll das ganze rein:
Zum Fahrzeug selber gibt es vieles im Internet deshalb möchte ich da nicht ins Detail gehen. Für den Verwendungszweck als Rasenmäher ist die Federung und Achsverwindung allerdings nicht geeignet – es sei denn jemand wünscht sich einen Wellenschnitt im Rasen. Somit wurden die Antriebsachsen durch zwei Längsträger starr verbunden. Der Achsabstand auf 340mm vergrößert.
An die Längsträger wird die Grundplatte des Mähwerks befestigt. Damit das Ganze nicht zu starr wird finden hier sogenannte D-Locks Verwendung. Hier mal der Grundaufbau mit Antrieb und einem Messerbalken.
Mähwerk:
Als Schneide verwende ich die einfachen Trapezklingen aus einem Teppichbodenmesser. Sofern keine Steine oder andere Fremdkörper im Rasen liegen müsste das funktionieren. Auf alle Fälle gibt es einen besseren Schnitt als mit dem klassischen Mähmesser.
Der Lagerflansch hat zwei Kugellager und eine zentrale Bohrung zum Abschmieren.
Fertig sieht das Ganze dann so aus. Auf der Karosserie hab ich noch aus alten Tagen die Halterung für die FPV-Kamera.
Das ist im Moment der aktuelle Stand. Da die wesentlichen Teile schon alle fertig sind und „nur“ noch Anpassungen und Montage erfolgen hoffe ich mal, dass es zügig vorangeht bis der erste Grashalm fällt.
Jetzt bin ich mal auf Eure Meinungen gespannt…
Grüße
Knut
So, weiter gehts....
am Wochenende hab ich alle noch ausstehende Teile gefertigt und mit der Montage begonnen. Was im Moment unheimlich aufhält ist das Anpassen der Schrauben. Leider hab ich nicht sonderlich auf Normlängen und eigener Schraubenbestand geachtet. Jetzt muss ich fast alle Schrauben abnehmen.
Dennoch nimmt das Mähwerk langsam Gestalt an...
Weiter unten hab ich meine ersten Mähversuche dokumentiert...
So, nun die finale Endmontage
Das Mähwerk montiert und an das Chassis geschraubt
Die Regler der Mähwerksmotoren
Die Halterung für Karosserie und Elektronik
Das Ganze dann zusammen montiert
von vorne... beim mittleren Motor geht es ziemlich eng zu
von unten
und so siehts im Moment aus
soweit funktioniert alles. Neben den Fahrfunktionen läßt sich das Mähwerk stufenlos in der Drehzahl steuern.
Morgen werd ich mich noch den Getrieben widmen - wie zu erwarten war machen die Messing / Stahl Stirnräder mächtig Krach. Vielleicht hat ja jemand einen Tip wie man das halbwegs leise bekommt - mir fällt im Moment nur Fett ein.
Als nächstes werden die Mähmesser noch aufgebort und dann montiert. Sollte das Wetter morgen gut sein gibt es den ersten Mähversuch und natürlich Bilder und ggf einen Video.
Zuletzt bearbeitet: