So, gleich vorne weg das erste Flugvideo:
http://www.youtube.com/watch?v=wzPQS-Yae_4
und die Bilder des fertigen Produkts:





[hr][/hr]
Design
Jetzt wo ich schon ein Paar Monate meinem X525-basierten FPV-Quad fliege, und mittlerweile auch mal mit Brille unterwegs war, stelle ich immer mehr Nachteile des X525-Frames fest. Da ich von dem Konzept den Quads sowie den allgemeinen Leistungsdaten meiner Konfiguration doch recht überzeugt bin, habe ich mir überlegt, ein anderes Frame für den aufzubauen, welches die Nachteile des alten beheben würde. Konkret ging es mir um drei Punkte:
Als Inspiration für mein Design hat das Spidex Frame gedient, welches meiner Meinung nach extrem clever aufgebaut ist. Dennoch war es für meine Zwecke nicht perfekt (wieder Aluausleger, schwache Motorhalterungen, kleiner Akkuschacht). Also habe ich mir mal LibreCAD runtergeladen und folgendes ist soweit dabei rausgekommen:
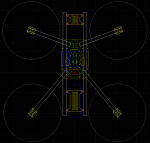
Gesamtansicht
Motorabstand wie gezeichnet ist 58cm (diagonal), die Motoren sind nahezu symmetrisch angeordnet. Eingezeichnet sind 11" Propeller. Arme werden aus 16mm CFK-Rohren gemacht, vorne 22cm lang, hinten 28cm - lassen sich also alle vier aus 1m Rohr schneiden. Schellen von Flyduino FCP HL, 23mm Lochabstand.
Die Längsrohre (16mm, je 50cm lang) werden oben über dem oberen Center angebracht, mit M3 Gummipuffern und einzelnen Schellen. Auf die Rohre wird vorne ein Halter für die GoPro angeschellt, und hinten eine Einlage für den Akku.
Unten drunter kommt ein Landegestell, dieses hier von Flyduino.
Nun zur Hardware, die verbaut wird. Diese wird komplett von meinem aktuellen Quad übernommen und beinhaltet folgendes:
[hr][/hr]
Baubericht
Alle Teile bereit für die Montage. Die Ordnung auf dem Schreibtisch hat nicht lange gehalten...

Rohre für die Ausleger gesägt. Mit einer scharfen Metallsäge und Schnittstellen abgeklebt mit Malertape, ging das Sägen doch ziemlich einfach. Die Längen sind mit 22cm und 28cm so gewählt, dass alle vier Ausleger aus einem 1m Rohr gesägt werden können.

Erste Schrauben eingesetzt. Die FCP HL Schellen passen wunderbar.

Center vormontiert, alles passt wie es soll.

Rest des Frames draufgeschraubt. Sieht fast fertig aus, oder?..

Motorwellen der NTMs sind auf der falschen Seite und müssen ab, damit die Motoren in die Halter über die Rohre passen. Mit Ducttape abkleben, damit keine Splitter an die Magnete im Motorinnern gelangen...

... und mit einer Dremel absägen. Neue Trennscheibe geht durch die 3mm Welle wie heißer Messer durch Butter. Danach schön feinschleifen.

Schrumpfschlauch von den ESCs abmachen und auf Kabel Umlöten vorbereiten.

Kabel auf passende Länge geschnitten und mit 3.5mm Buchsen für die Motoranschlüsse versehen. Drei Kabel pro Motor, dann noch die Stromverteilung - ganz schön viele Lötstellen für mich, der so gut wie keine Löterfahrung hat... und das ist nur ein Quad.

ESCs probeweise auf den unteren Center platziert, wie sie später befestigt werden...

... und die Kabel nach außen zur Motorhalterung geführt. Passt alles wie es soll!

ESCs neu einschrumpfen, nachdem neue Kabel dran sind.

Verkabelung des unteren Centers - die ESCs platziert und vorläufig festgemacht. Nicht perfekt sauber, aber gut genug für meine Ansprüche.

Stromverteilung inspiriert von RCExplorer. Die Kabel werden zusammengelegt...

... mit einer dünnen Kupferlitze umwickelt ...

... und dann verlötet und eingeschrumpft. Die Verbindung ist sehr stabil, mechanisch sowie elektrisch. Funktioniert gut.

Obere Framehälfte mit den gedämpften Längsrohren und der wichtigen Elektronik, FC und GPS.

Die andere Seite der oberen Centerplate: Videosender und das MinimOSD, festgemacht und verkabelt.

Probesitzen: die obere Hälfte liegt nur auf den Schraubenüberständen der unteren auf. Sieht alles gut aus.

Obere Hälfte nochmal komplett, mit der GoPro und dem Akku.

Das Gleiche von der anderen Seite nochmal, komplett verkabelt.

Untere Hälfte bereit für den Zusammenbau mit der oberen. Die Motoren sind abgestützt, damit die Rohre nicht durchbiegen und die Klemmen auflösen, wenn die temporären Schrauben entfernt werden.

Fast geschafft! Die obere Hälfte wird aufgesetzt und verschraubt, alle Kabel verbunden, und...

... fertig! Leider kann ich wetterbedingt nicht direkt einfliegen gehen, aber der Bau ist soweit.

[HR][/HR]
Ganz oben im Post habe ich mal das Video des ersten Fluges hinzugefügt.
Naja, was soll ich sagen? GEIL! Das Ding ist auf Anhieb stabil in der Luft gestanden. Habe die PIDs dann etwas hochgedreht, evtl. sogar etwas zu hoch - habe's in FPV nicht sehen können, aber im Vorwärtsflug gibt's kleine Wackler in der Rollachse, da muss ich das P noch etwas rausnehmen so wie's aussieht. Sonst alles wunderbar, fliegt sich sehr viel angenehmer als der alte X525-Quad, und sieht meiner Meinung nach in der Luft einfach Klasse aus")
Einen Akku habe ich probeweise zum Anschlag des LiPo-Warners runterlaufen lassen. Ergebnis: eine Flugzeit von 14:20 inkl. der Landung, und ein wenig Reserve war im Akku noch drin. Bin ich absolut zufrieden mit, mit dem Gewicht von satten 1.9 kg habe ich ehrlich gesagt mit weniger gerechnet.
Jetzt werden die Tage bei gutem Wetter weitere Flüge gemacht, das Ding macht in FPV absolut Spaß zu fliegen. Da muss ich mir mal gute Locations aussuchen und das Ding etwas zum Einsatz bringen.
[HR][/HR]
Natürlich sind auch jegliche weitere Kritik, Ideen, Vorschläge und sonstige Kommentare immer willkommen.
http://www.youtube.com/watch?v=wzPQS-Yae_4
und die Bilder des fertigen Produkts:
[hr][/hr]
Design
Jetzt wo ich schon ein Paar Monate meinem X525-basierten FPV-Quad fliege, und mittlerweile auch mal mit Brille unterwegs war, stelle ich immer mehr Nachteile des X525-Frames fest. Da ich von dem Konzept den Quads sowie den allgemeinen Leistungsdaten meiner Konfiguration doch recht überzeugt bin, habe ich mir überlegt, ein anderes Frame für den aufzubauen, welches die Nachteile des alten beheben würde. Konkret ging es mir um drei Punkte:
- Platzangebot. Auf dem X525 ist schlicht nicht genug Platz für die gesamte FPV-Ausrüstung vorhanden, ohne zu komplexen und schweren Anbauten zu greifen.
- Gewicht. Das X525 ist viel zu schwer.
- Stabilität. Mit den dünnen Aluauslegern ist der X525 nicht steif und nicht crashresistent genug. Das Landegestell lässt auch zu wünschen übrig.
Als Inspiration für mein Design hat das Spidex Frame gedient, welches meiner Meinung nach extrem clever aufgebaut ist. Dennoch war es für meine Zwecke nicht perfekt (wieder Aluausleger, schwache Motorhalterungen, kleiner Akkuschacht). Also habe ich mir mal LibreCAD runtergeladen und folgendes ist soweit dabei rausgekommen:
Gesamtansicht
Motorabstand wie gezeichnet ist 58cm (diagonal), die Motoren sind nahezu symmetrisch angeordnet. Eingezeichnet sind 11" Propeller. Arme werden aus 16mm CFK-Rohren gemacht, vorne 22cm lang, hinten 28cm - lassen sich also alle vier aus 1m Rohr schneiden. Schellen von Flyduino FCP HL, 23mm Lochabstand.
Die Längsrohre (16mm, je 50cm lang) werden oben über dem oberen Center angebracht, mit M3 Gummipuffern und einzelnen Schellen. Auf die Rohre wird vorne ein Halter für die GoPro angeschellt, und hinten eine Einlage für den Akku.
Unten drunter kommt ein Landegestell, dieses hier von Flyduino.
Nun zur Hardware, die verbaut wird. Diese wird komplett von meinem aktuellen Quad übernommen und beinhaltet folgendes:
- NTM 28-30 750kv
- Graupner E-Props. 11x5
- HK Blue Series 30A
- Crius SE v0.1
- Drotek I2C GPS
- Nanotech 4S 4500mAh
- GoPro 2
- ImmersionRC 5.8G TX
- MinimOSD
[hr][/hr]
Baubericht
Alle Teile bereit für die Montage. Die Ordnung auf dem Schreibtisch hat nicht lange gehalten...
Rohre für die Ausleger gesägt. Mit einer scharfen Metallsäge und Schnittstellen abgeklebt mit Malertape, ging das Sägen doch ziemlich einfach. Die Längen sind mit 22cm und 28cm so gewählt, dass alle vier Ausleger aus einem 1m Rohr gesägt werden können.
Erste Schrauben eingesetzt. Die FCP HL Schellen passen wunderbar.
Center vormontiert, alles passt wie es soll.
Rest des Frames draufgeschraubt. Sieht fast fertig aus, oder?..
Motorwellen der NTMs sind auf der falschen Seite und müssen ab, damit die Motoren in die Halter über die Rohre passen. Mit Ducttape abkleben, damit keine Splitter an die Magnete im Motorinnern gelangen...
... und mit einer Dremel absägen. Neue Trennscheibe geht durch die 3mm Welle wie heißer Messer durch Butter. Danach schön feinschleifen.
Schrumpfschlauch von den ESCs abmachen und auf Kabel Umlöten vorbereiten.
Kabel auf passende Länge geschnitten und mit 3.5mm Buchsen für die Motoranschlüsse versehen. Drei Kabel pro Motor, dann noch die Stromverteilung - ganz schön viele Lötstellen für mich, der so gut wie keine Löterfahrung hat... und das ist nur ein Quad.
ESCs probeweise auf den unteren Center platziert, wie sie später befestigt werden...
... und die Kabel nach außen zur Motorhalterung geführt. Passt alles wie es soll!
ESCs neu einschrumpfen, nachdem neue Kabel dran sind.
Verkabelung des unteren Centers - die ESCs platziert und vorläufig festgemacht. Nicht perfekt sauber, aber gut genug für meine Ansprüche.
Stromverteilung inspiriert von RCExplorer. Die Kabel werden zusammengelegt...
... mit einer dünnen Kupferlitze umwickelt ...
... und dann verlötet und eingeschrumpft. Die Verbindung ist sehr stabil, mechanisch sowie elektrisch. Funktioniert gut.
Obere Framehälfte mit den gedämpften Längsrohren und der wichtigen Elektronik, FC und GPS.
Die andere Seite der oberen Centerplate: Videosender und das MinimOSD, festgemacht und verkabelt.
Probesitzen: die obere Hälfte liegt nur auf den Schraubenüberständen der unteren auf. Sieht alles gut aus.
Obere Hälfte nochmal komplett, mit der GoPro und dem Akku.
Das Gleiche von der anderen Seite nochmal, komplett verkabelt.
Untere Hälfte bereit für den Zusammenbau mit der oberen. Die Motoren sind abgestützt, damit die Rohre nicht durchbiegen und die Klemmen auflösen, wenn die temporären Schrauben entfernt werden.
Fast geschafft! Die obere Hälfte wird aufgesetzt und verschraubt, alle Kabel verbunden, und...
... fertig! Leider kann ich wetterbedingt nicht direkt einfliegen gehen, aber der Bau ist soweit.
[HR][/HR]
Ganz oben im Post habe ich mal das Video des ersten Fluges hinzugefügt.
Naja, was soll ich sagen? GEIL! Das Ding ist auf Anhieb stabil in der Luft gestanden. Habe die PIDs dann etwas hochgedreht, evtl. sogar etwas zu hoch - habe's in FPV nicht sehen können, aber im Vorwärtsflug gibt's kleine Wackler in der Rollachse, da muss ich das P noch etwas rausnehmen so wie's aussieht. Sonst alles wunderbar, fliegt sich sehr viel angenehmer als der alte X525-Quad, und sieht meiner Meinung nach in der Luft einfach Klasse aus
Einen Akku habe ich probeweise zum Anschlag des LiPo-Warners runterlaufen lassen. Ergebnis: eine Flugzeit von 14:20 inkl. der Landung, und ein wenig Reserve war im Akku noch drin. Bin ich absolut zufrieden mit, mit dem Gewicht von satten 1.9 kg habe ich ehrlich gesagt mit weniger gerechnet.
Jetzt werden die Tage bei gutem Wetter weitere Flüge gemacht, das Ding macht in FPV absolut Spaß zu fliegen. Da muss ich mir mal gute Locations aussuchen und das Ding etwas zum Einsatz bringen.
[HR][/HR]
Natürlich sind auch jegliche weitere Kritik, Ideen, Vorschläge und sonstige Kommentare immer willkommen.
Zuletzt bearbeitet: