Moinmoin Tilman,
danke für die Antwort und daß du drangeblieben bist.
")
Sorry, über 1200 Posts, der Super-Moderator und dieser Schreibstil ließen nicht wirklich auf jemanden schließen, den man als Neuling behandeln muss.
Tja, 1200+ Posts, seit 2009 dabei, Super-Moderator und Schreibstil sind leider kein Garant dafür, daß einer ALLES weiß, dadurch wird man nicht automatisch zu "Gott"!
Meine Kernkompetenzen im Modellbau liegen auf turbinengetriebenen Jets, deren Bau, Betrieb und Wartung, was auch der Grund ist, warum ich vom FPV Abstand nehmen mußte (der Betrieb solcher Modelle mit legalem FPV Equipment war mein Traum, aber ist IMHO nicht mit hinreichender Sicherheit möglich und da muß man eben Prioritäten setzen).
Meinen ersten Kopter habe ich vor 30Jahren gebaut, die Steuerung (besser: Regelung) war ein Operationsverstärkergrab (ANALOG-Technik!!!) mit zahllosen Potis versehen, Bürstenmotoren, NiCad-Akkus und den mittlerweile fossilen ADXL-Beschleunigungssensoren von Analog Devices. Das war damals Leading Edge of HiTec und sauteuer - und ich noch Student... PID-Regelungstechnik gab es damals auch schon und ein OP kann alles, was man braucht: integrieren, differenzieren, verstärken, rechnen, alles was du willst! Damals galt: µController??? Hä? Wasn das?? Und wenn, dann viiiieeeeel zu langsam und/oder zu teuer. Das sieht heute ganz anders aus.
Dennoch, von Koptern hielt ich Abstand, weil ich nicht nochn Eurograb brauchen konnte, Faszination hin oder her, Disziplin bitte!! Dann lief mir dieses unwiderstehliche Angebot eines gebrauchten DJI Phantom-1 in Top-Zustand über den Weg, sogar schon mit einem Gimbal dran... eine fliegende Videoplattform in Verbindung mit den Eigenschaften dieser NAZA - einfach nur genial!! Tja... und dann passierte es.
On Topic:
eine Mobius hat gegenüber einer GoPro entscheidende Vorteile, wenns fliegen muß:
- beinahe ebenbürtige Bildqualität
- leicht! 1/4 der GoPro-Masse!
- klein und schlank!
- kein cw-Wert und Stirnfläche eines Kleiderschranks
-wegen Objektivauswahl viel besser geeignet als fliegende Videoplattform (der extreme Weitwinkel einer GoPro mit 170° ist da eher kontraproduktiv: "das Pixel da hinten ist der Flieger, den ich aufnehmen wollte")
- last not least: preisgünstig!
Ein Gimbal, egal welcher, ist letztendlich nur ein Regelkreis, man kommt an die Parameter dran, Geometrien und Gleichgewichtspunkte kann man anpassen. Also rausbekommen, was für ein Gimbal das genau ist, Software schnappen, einstellen auf die anderen Trägheitsmomente einer Mobius, ab dafür!
Oder um im Bild zu bleiben: der Schuh mit Gr43 ist durchaus in der Lage, sich an Gr39 anzupassen! Er muß nicht mit "Zeitungspapier" (=Blei) ausgefüttert werden, damit der Fuß Gr39 (=Mobius) reinpaßt.
Eine sauteure GoPro müßte ich erstmal zerlegen und das Objektiv wechseln, bevor ich sie sinnvoll für meine Zwecke benützen könnte. Und was ist dann? Die Masse und der Schwerpunkt ändert sich und schon paßts nicht mehr. A Schmarrn wär des, oder? Die GoPro ist schlicht ungeeignet für mein Vorhaben.
Sodele, anbei ein paar Fotos, anhand derer man hoffentlich erkennen kann, ob es sich tatsächlich um den CM2000 handelt oder ein Plaggiat und welche Version das ist. Eine klärende Beschriftung fand ich leider nicht, hmmm.... aber vllt entdeckt dein geübtes Auge eindeutige Merkmale, also mal auf gut-Glück
:


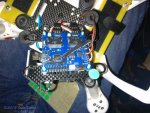



Achso, habe eine angepaßte Waage für die Mobius gebaut und klar, jedes Objekt auf der Waage muß "knallhart" mit ihr verbunden sein, sonst erzeugt man einen neuen Schwingkreis mit eigenen Resonanzfrequenzen, derer man nicht mehr Herr wird.
Ich vermute, daß du richtig liegst, daß der Gimbal eine frühe Version ist, soweit ich erfuhr, ist der schon mind. 2Jahre alt... zumindest ungefähr.
Wenn ich noch etwas zur Identifikation beitragen kann, gerne!
Jetzt schau ich mir mal deine Links an und sehe zu, daß ich schlauer draus werde!
Danke und viele Grüße,
o.d.